|
VM2D 1.14
Vortex methods for 2D flows simulation
|
|
VM2D 1.14
Vortex methods for 2D flows simulation
|
Класс, опеделяющий вихревой след (пелену) More...
#include <Wake2D.h>
Public Member Functions | |
| Wake (const World2D &W_) | |
| Конструктор инициализации | |
| ~Wake () | |
| Деструктор | |
| void | Inside (const std::vector< Point2D > &newPos, Airfoil &afl, bool isMoves, const AirfoilGeometry &oldAfl) |
| Проверка пересечения вихрями следа профиля при перемещении | |
| void | Restruct () |
| Реструктуризация вихревого следа | |
| int | RemoveFar () |
| Зануление далеко улетевших вихрей | |
| size_t | RemoveZero () |
| Исключение нулевых и мелких вихрей | |
| bool | MoveInside (const Point2D &newPos, const Point2D &oldPos, const Airfoil &afl, size_t &panThrough) const |
| Проверка проникновения точки через границу профиля | |
| bool | MoveInsideMovingBoundary (const Point2D &newPos, const Point2D &oldPos, const AirfoilGeometry &oldAfl, const Airfoil &afl, size_t &panThrough) const |
| Проверка проникновения точки через границу профиля | |
| void | GetPairs (int type) |
| Поиск ближайшего соседа | |
| void | GetPairsBS (int type) |
| void | GetPairsClosestNeib (int type) |
| void | GetPairsBH (int type) |
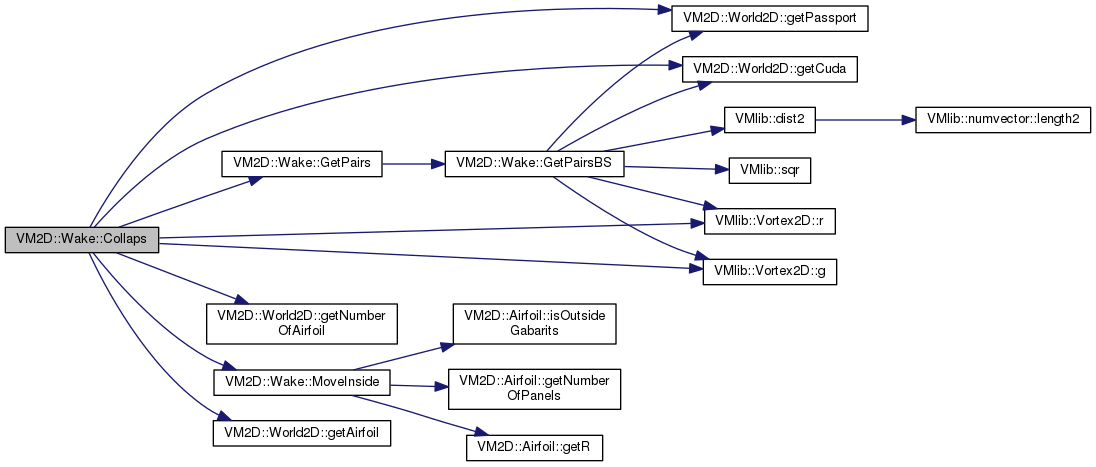
| int | Collaps (int type, int times) |
| Коллапс вихрей | |
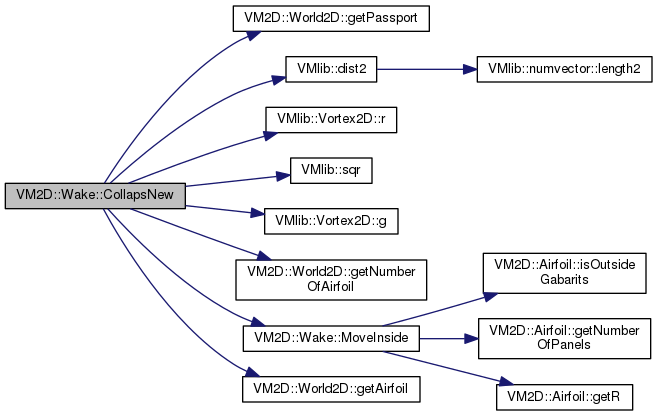
| int | CollapsNew (int type, int times) |
| int | CollapsNewFast (int type, int times, std::vector< Vortex2D > &ri, std::vector< Vortex2D > &rj, std::vector< Point2D > &rnew, std::vector< std::pair< int, int > > &rindex) |
| void | ReadFromFile (const std::string &dir, const std::string &fileName) |
| Считывание вихревого следа из файла | |
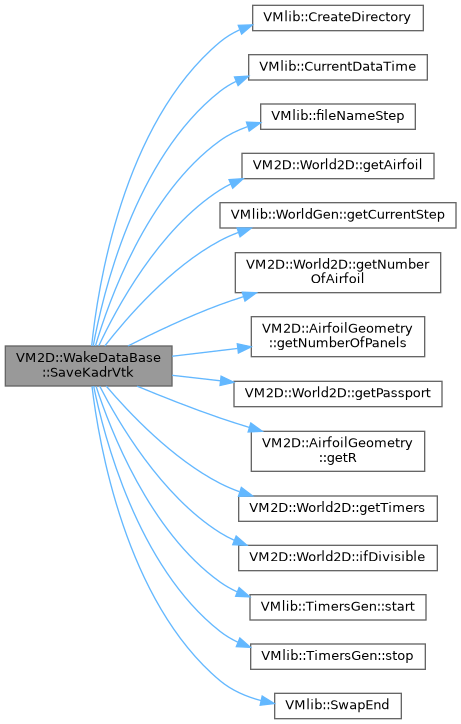
| void | SaveKadrVtk (const std::string &filePrefix="Kadr") const |
| Сохранение вихревого следа в файл .vtk. | |
Public Attributes | |
| double | collapseRightBorderParameter |
| абсцисса, правее которой происходит линейный (вправо) рост радиуса коллапса | |
| double | collapseScaleParameter |
| характерный масштаб, на котором происходит рост радиуса коллапса | |
| const World2D & | W |
| Константная ссылка на решаемую задачу | |
| std::vector< Vortex2D > | vtx |
| Список вихревых элементов | |
Private Attributes | |
| std::vector< int > | neighb |
| Вектор потенциальных соседей для будущего коллапса | |
| std::vector< int > | neighbNew |
Класс, опеделяющий вихревой след (пелену)
\Version 1.14
|
inline |
Конструктор инициализации
| [in] | W_ | константная ссылка на решаемую задачу |
Definition at line 76 of file Wake2D.h.
| int Wake::Collaps | ( | int | type, |
| int | times | ||
| ) |
Коллапс вихрей
| [in] | type | тип коллапса:
|
| [in] | times | число проходов алгоритма коллапса |
Definition at line 475 of file Wake2D.cpp.

| int Wake::CollapsNew | ( | int | type, |
| int | times | ||
| ) |
Definition at line 590 of file Wake2D.cpp.
| int Wake::CollapsNewFast | ( | int | type, |
| int | times, | ||
| std::vector< Vortex2D > & | ri, | ||
| std::vector< Vortex2D > & | rj, | ||
| std::vector< Point2D > & | rnew, | ||
| std::vector< std::pair< int, int > > & | rindex | ||
| ) |
Definition at line 685 of file Wake2D.cpp.

| void Wake::GetPairs | ( | int | type | ) |
Поиск ближайшего соседа
| [in] | type | тип коллапса:
|
Definition at line 318 of file Wake2D.cpp.

| void VM2D::Wake::GetPairsBH | ( | int | type | ) |
| void Wake::GetPairsBS | ( | int | type | ) |
Definition at line 324 of file Wake2D.cpp.

| void Wake::GetPairsClosestNeib | ( | int | type | ) |
Definition at line 385 of file Wake2D.cpp.

| void Wake::Inside | ( | const std::vector< Point2D > & | newPos, |
| Airfoil & | afl, | ||
| bool | isMoves, | ||
| const AirfoilGeometry & | oldAfl | ||
| ) |
Проверка пересечения вихрями следа профиля при перемещении
Исполняется сразу для всех вихрей в пелене, осуществляет проверку для отдельного профиля
Вихри, попавшие внутрь профиля, получают нулевую циркуляцию, а их "бывшая" циркуляция передается в вектор gammaThrough в структуру данных профиля
| [in] | newPos | константная ссылка на вектор из новых положений вихрей в вихревом следе |
| [in] | isMoves | признак того, что профиль подвижный |
| [in] | oldAfl | константная ссылка контролируемый профиль до перемещения (используется, если у профиля стоит признак того, что он движется) |
| [in,out] | afl | ссылка на контролируемый профиль (происходит изменение afl->gammaThrough) |
Definition at line 273 of file Wake2D.cpp.
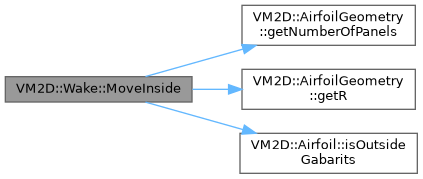
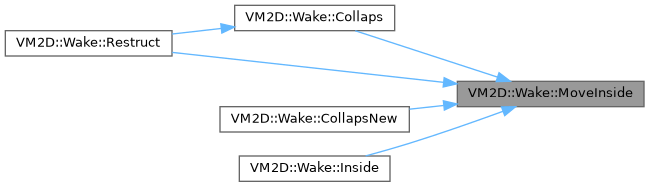
| bool Wake::MoveInside | ( | const Point2D & | newPos, |
| const Point2D & | oldPos, | ||
| const Airfoil & | afl, | ||
| size_t & | panThrough | ||
| ) | const |
Проверка проникновения точки через границу профиля
| [in] | newPos | константная ссылка на смещенное (новое) положение |
| [in] | oldPos | константная ссылка на несмещенное (старое) положение |
| [in] | afl | константная ссылка на контролируемый профиль |
| [out] | panThrough | номер "протыкаемой" панели return признак пересечения профиля |
Definition at line 62 of file Wake2D.cpp.
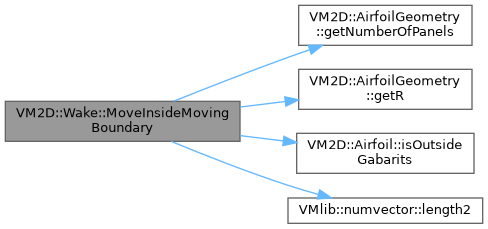
| bool Wake::MoveInsideMovingBoundary | ( | const Point2D & | newPos, |
| const Point2D & | oldPos, | ||
| const AirfoilGeometry & | oldAfl, | ||
| const Airfoil & | afl, | ||
| size_t & | panThrough | ||
| ) | const |
Проверка проникновения точки через границу профиля
| [in] | newPos | константная ссылка на смещенное (новое) положение вихря |
| [in] | oldPos | константная ссылка на несмещенное (старое) положение вихря |
| [in] | oldAfl | константная ссылка на состояние контролируемого профиля до перемещения |
| [in] | afl | константная ссылка на контролируемый профиль |
| [out] | panThrough | номер "протыкаемой" панели return признак пересечения профиля |
Definition at line 178 of file Wake2D.cpp.

|
inherited |
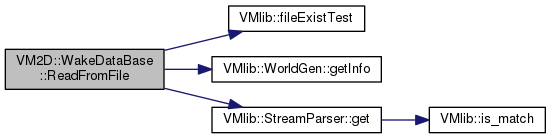
Считывание вихревого следа из файла
| [in] | dir | константная ссылка на строку, задающую каталог, где лежит файл с вихревым следом |
| [in] | fileName | константная ссылка на строку, задающую имя файла с вихревым следом |
Definition at line 55 of file WakeDataBase2D.cpp.
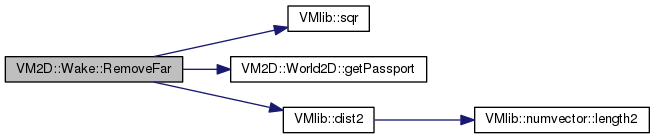
| int Wake::RemoveFar | ( | ) |
Зануление далеко улетевших вихрей
Definition at line 788 of file Wake2D.cpp.
| size_t Wake::RemoveZero | ( | ) |
Исключение нулевых и мелких вихрей
Definition at line 808 of file Wake2D.cpp.
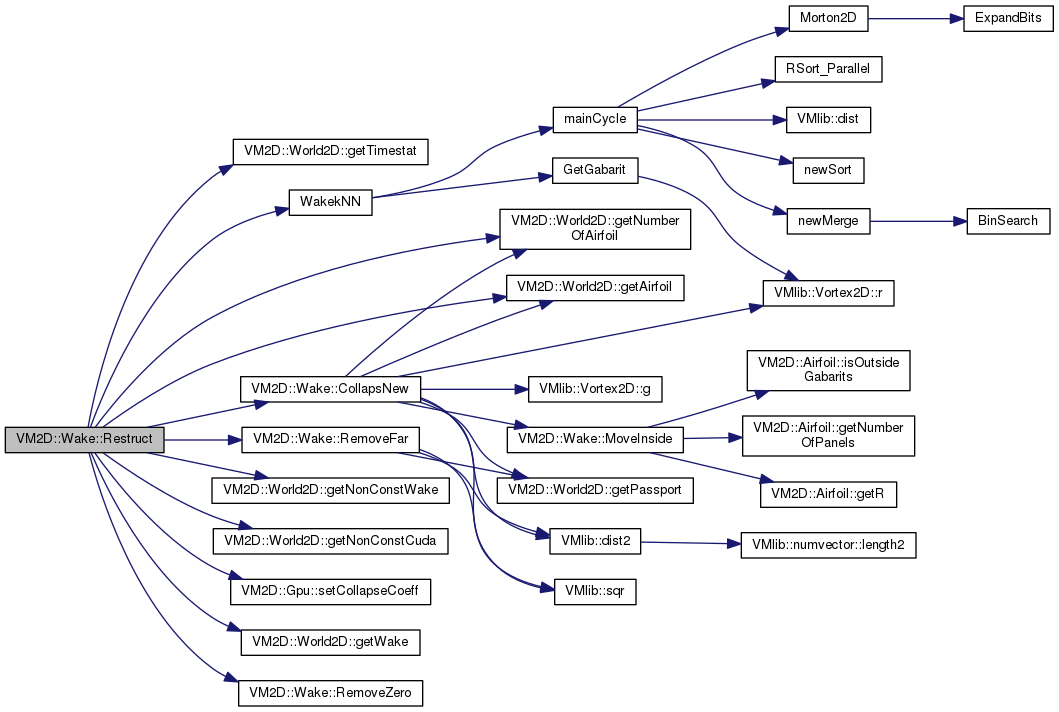
| void Wake::Restruct | ( | ) |
Реструктуризация вихревого следа
Исполняется сразу для всех вихрей в пелене
Вихри, находящиеся далеко от профилей, удаляются
Вихри, которые сильно сблизились, коллапсируются
Definition at line 831 of file Wake2D.cpp.
|
inherited |
Сохранение вихревого следа в файл .vtk.
Definition at line 109 of file WakeDataBase2D.cpp.
| double VM2D::Wake::collapseRightBorderParameter |
| double VM2D::Wake::collapseScaleParameter |
|
private |
|
inherited |
Список вихревых элементов
Definition at line 81 of file WakeDataBase2D.h.
|
inherited |
Константная ссылка на решаемую задачу
Definition at line 71 of file WakeDataBase2D.h.