|
VM2D 1.14
Vortex methods for 2D flows simulation
|
|
VM2D 1.14
Vortex methods for 2D flows simulation
|
Абстрактный класс, определяющий обтекаемый профиль More...
#include <Airfoil2D.h>
Public Member Functions | |
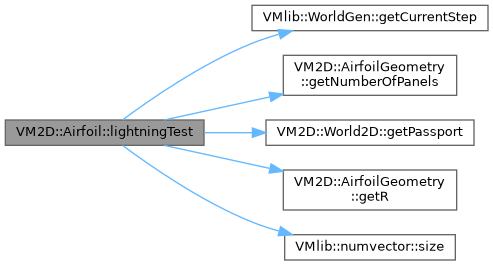
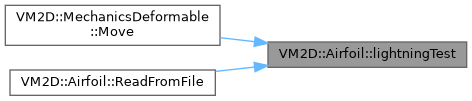
| void | lightningTest () |
| Тест на "отвещенность". | |
| IFCUDA (mutable double *devRPtr) | |
| Указатель на девайсе, где хранятся вершины профиля | |
| IFCUDA (mutable double *devPsnPtr) | |
| Указатель на девайсе, где хранятся псевдонормали профиля | |
| IFCUDA (mutable double *devRhsPtr) | |
| Указатель на девайсе, где хранится правая часть (константная) матрицы | |
| IFCUDA (mutable double *devRhsLinPtr) | |
| Указатель на девайсе, где хранится правая часть (линейная) матрицы | |
| IFCUDA (mutable std::vector< double > tmpRhs) | |
| Указатель на хосте, где хранится временная часть матрицы, полученная с девайса | |
| IFCUDA (mutable double *devFreeVortexSheetPtr) | |
| Указатель на девайсе, где хранятся интенсивности (константные) свободного вихревого слоя на панелях | |
| IFCUDA (mutable double *devFreeVortexSheetLinPtr) | |
| Указатель на девайсе, где хранятся интенсивности (линейные) свободного вихревого слоя на панелях | |
| IFCUDA (mutable double *devAttachedVortexSheetPtr) | |
| Указатель на девайсе, где хранятся интенсивности (константные) присоединенного вихревого слоя на панелях | |
| IFCUDA (mutable double *devAttachedVortexSheetLinPtr) | |
| Указатель на девайсе, где хранятся интенсивности (линейные) присоединенного вихревого слоя на панелях | |
| IFCUDA (mutable double *devAttachedSourceSheetPtr) | |
| Указатель на девайсе, где хранятся интенсивности (константные) присоединенного слоя источников на панелях | |
| IFCUDA (mutable double *devAttachedSourceSheetLinPtr) | |
| Указатель на девайсе, где хранятся интенсивности (линейные) присоединенного слоя источников на панелях | |
| IFCUDA (mutable double *devMeanEpsOverPanelPtr) | |
| Указатель на девайсе, где хранятся средние eps на панелях | |
| IFCUDA (mutable double *devViscousStressesPtr) | |
| Указатель на девайсе, где хранится вектор (по панелям) для силы вязкого трения | |
| IFCUDA (mutable std::vector< double > tmpViscousStresses) | |
| Указатель на хосте, где хранится временная часть вектора (по панелям) для силы вязкого трения | |
| Airfoil (const World2D &W_, const size_t numberInPassport_) | |
| virtual | ~Airfoil () |
| Деструктор | |
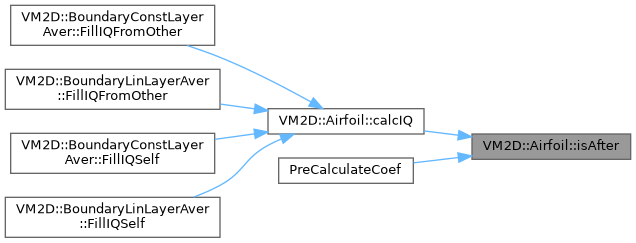
| bool | isAfter (size_t i, size_t j) const |
| Проверка, идет ли вершина i следом за вершиной j. | |
| void | CalcNrmTauLen () |
| Вычисление нормалей, касательных и длин панелей по текущему положению вершин | |
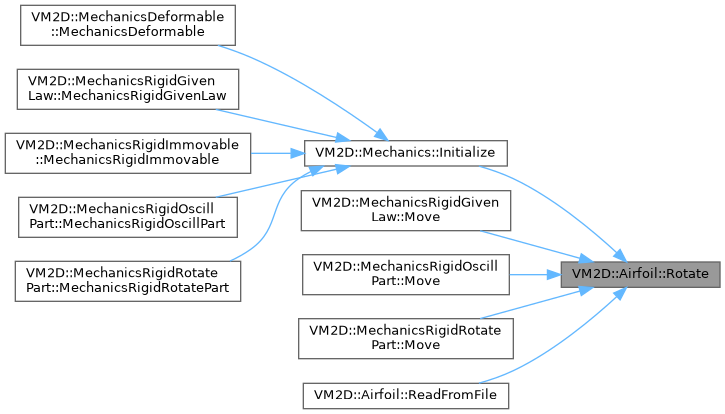
| virtual void | Rotate (double alpha) |
| Поворот профиля | |
| virtual void | Scale (const Point2D &) |
| Масштабирование профиля | |
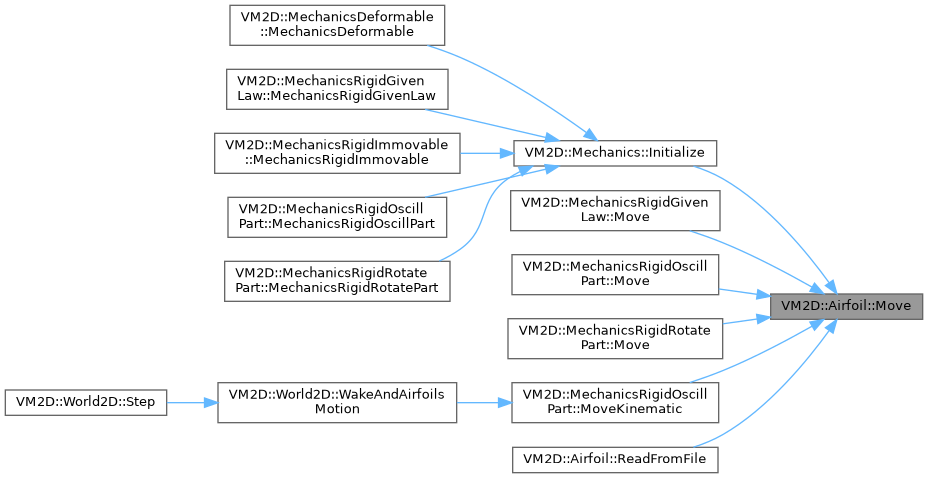
| virtual void | Move (const Point2D &dr) |
| Перемещение профиля | |
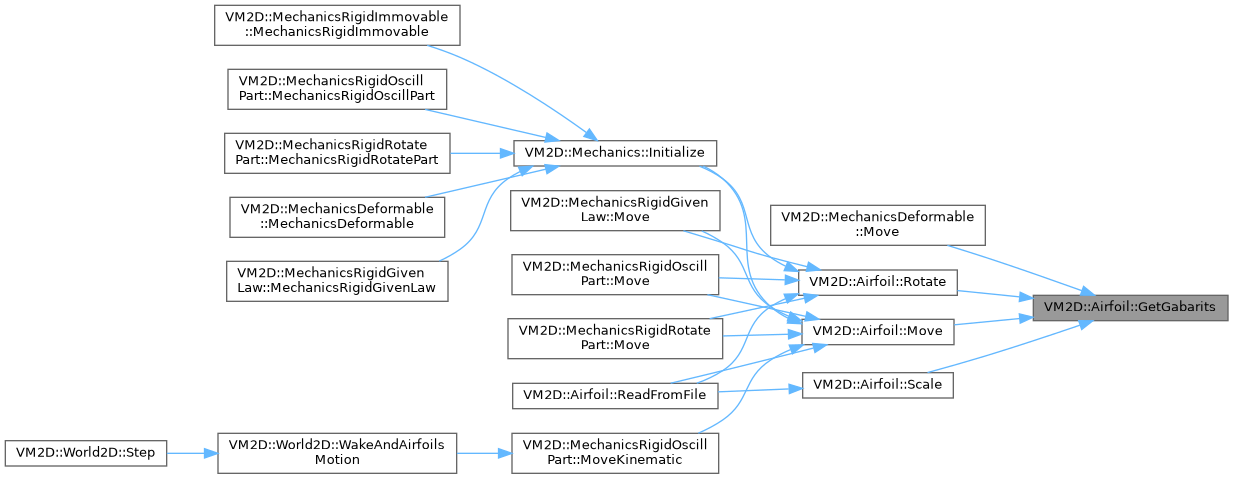
| virtual void | GetGabarits (double gap=0.02) |
| Вычисляет габаритный прямоугольник профиля | |
| bool | isInsideGabarits (const Point2D &r) const |
| Определяет, находится ли точка с радиус-вектором \( \vec r \) внутри габаритного прямоугольника профиля | |
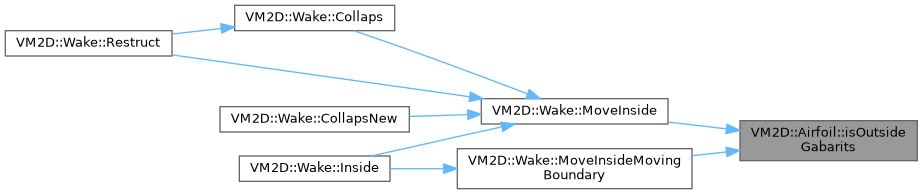
| bool | isOutsideGabarits (const Point2D &r) const |
| Определяет, находится ли точка с радиус-вектором \( \vec r \) вне габаритного прямоугольника профиля | |
| virtual bool | IsPointInAirfoil (const Point2D &point) const |
| Определяет, находится ли точка с радиус-вектором \( \vec r \) внутри профиля | |
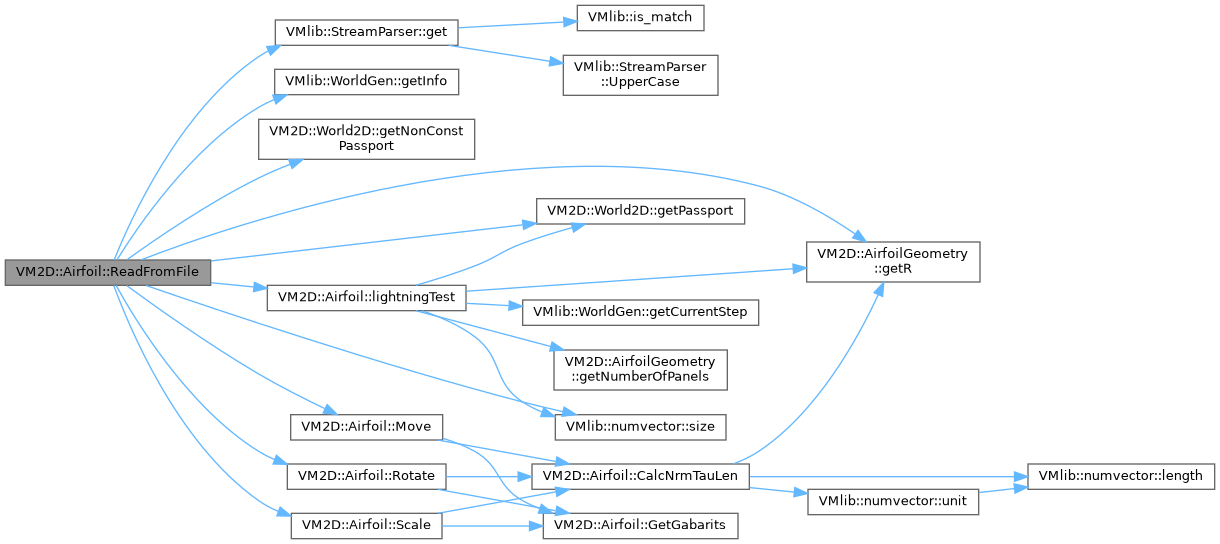
| virtual void | ReadFromFile (const std::string &dir) |
| Считывание профиля из файла | |
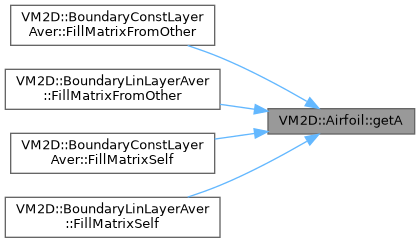
| virtual std::vector< double > | getA (size_t p, size_t i, const Airfoil &airfoil, size_t j) const |
| Вычисление коэффициентов матрицы A для расчета влияния панели на панель | |
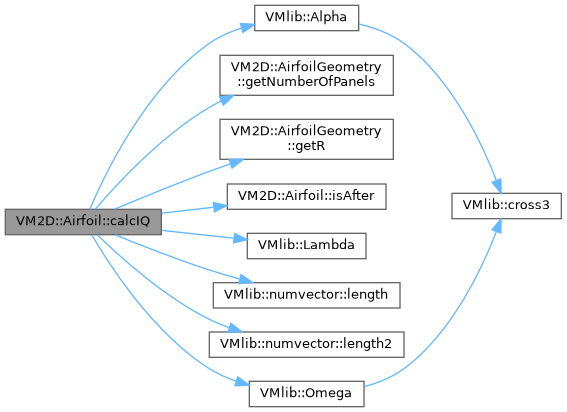
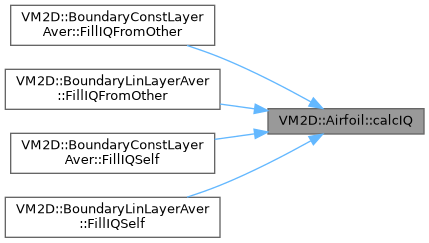
| virtual void | calcIQ (size_t p, const Airfoil &otherAirfoil, std::pair< Eigen::MatrixXd, Eigen::MatrixXd > &matrPair) const |
| Вычисление коэффициентов матрицы, состоящей из интегралов от (r-xi)/|r-xi|^2. | |
| void | calcMeanEpsOverPanel () |
| Вычисление средних значений eps на панелях | |
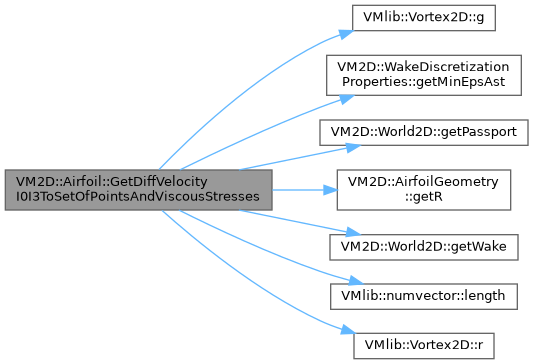
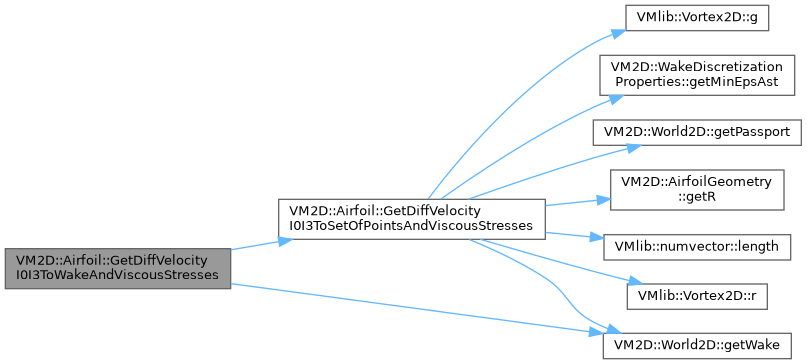
| virtual void | GetDiffVelocityI0I3ToSetOfPointsAndViscousStresses (const WakeDataBase &pointsDb, std::vector< double > &domainRadius, std::vector< double > &I0, std::vector< Point2D > &I3) |
| Вычисление числителей и знаменателей диффузионных скоростей в заданном наборе точек, обусловленных геометрией профиля, и вычисление вязкого трения | |
| virtual void | GetDiffVelocityI0I3ToWakeAndViscousStresses (const WakeDataBase &pointsDb, std::vector< double > &domainRadius, std::vector< double > &I0, std::vector< Point2D > &I3) |
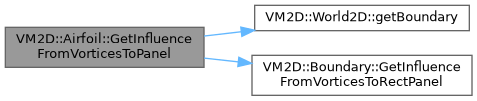
| virtual void | GetInfluenceFromVorticesToPanel (size_t panel, const Vortex2D *ptr, ptrdiff_t count, std::vector< double > &panelRhs) const |
| Вычисление влияния части подряд идущих вихрей из вихревого следа на панель для правой части | |
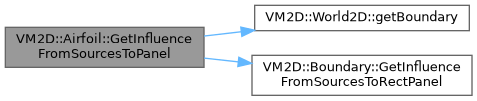
| virtual void | GetInfluenceFromSourcesToPanel (size_t panel, const Vortex2D *ptr, ptrdiff_t count, std::vector< double > &panelRhs) const |
| Вычисление влияния части подряд идущих источников из области течения на панель для правой части | |
| virtual void | GetInfluenceFromSourceSheetToVortex (size_t panel, const Vortex2D &vtx, Point2D &vel) const |
| Вычисление влияния слоя источников конкретной прямолинейной панели на вихрь в области течения | |
| virtual void | GetInfluenceFromVortexSheetToVortex (size_t panel, const Vortex2D &vtx, Point2D &vel) const |
| Вычисление влияния вихревых слоев (свободный + присоединенный) конкретной прямолинейной панели на вихрь в области течения | |
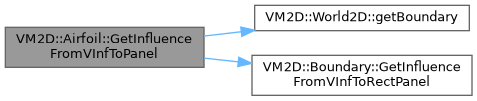
| virtual void | GetInfluenceFromVInfToPanel (std::vector< double > &vInfRhs) const |
| Вычисление влияния набегающего потока на панель для правой части | |
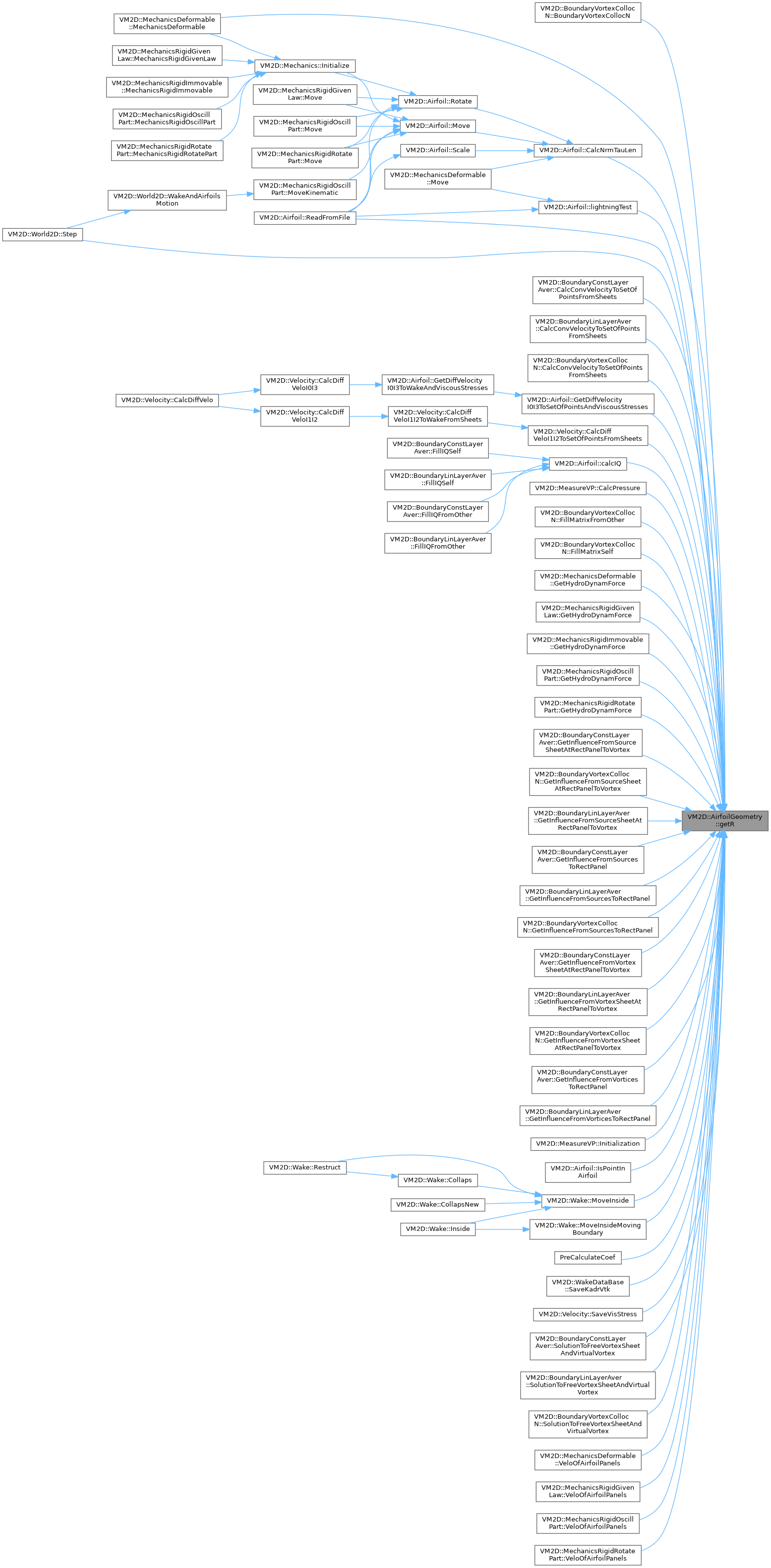
| const Point2D & | getR (size_t q) const |
| Возврат константной ссылки на вершину профиля | |
| Point2D & | setR (size_t q) |
| Возврат ссылки на вершину профиля | |
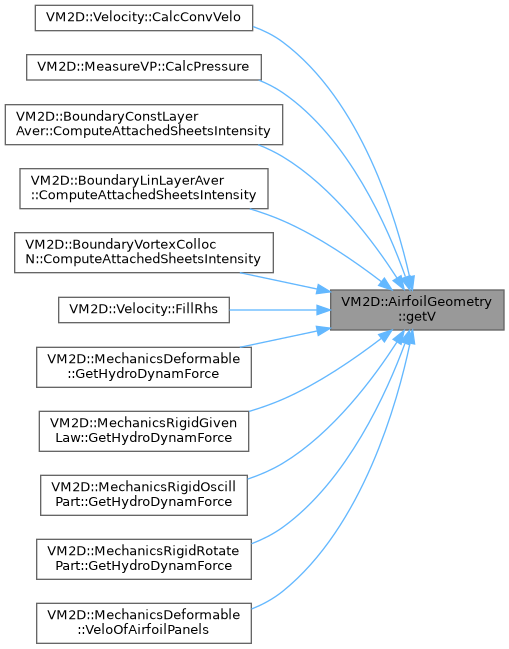
| const Point2D & | getV (size_t q) const |
| Возврат константной ссылки на скорость вершины профиля | |
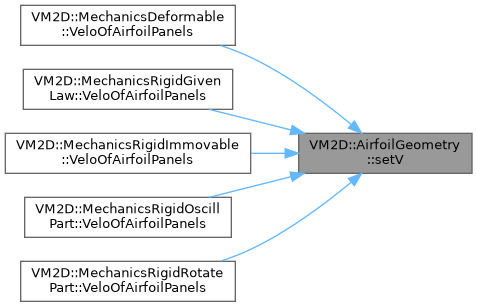
| void | setV (const Point2D &vel) |
| Установка постоянной скорости всех вершин профиля | |
| void | setV (const std::vector< Point2D > &vel) |
| Установка скоростей всех вершин профиля | |
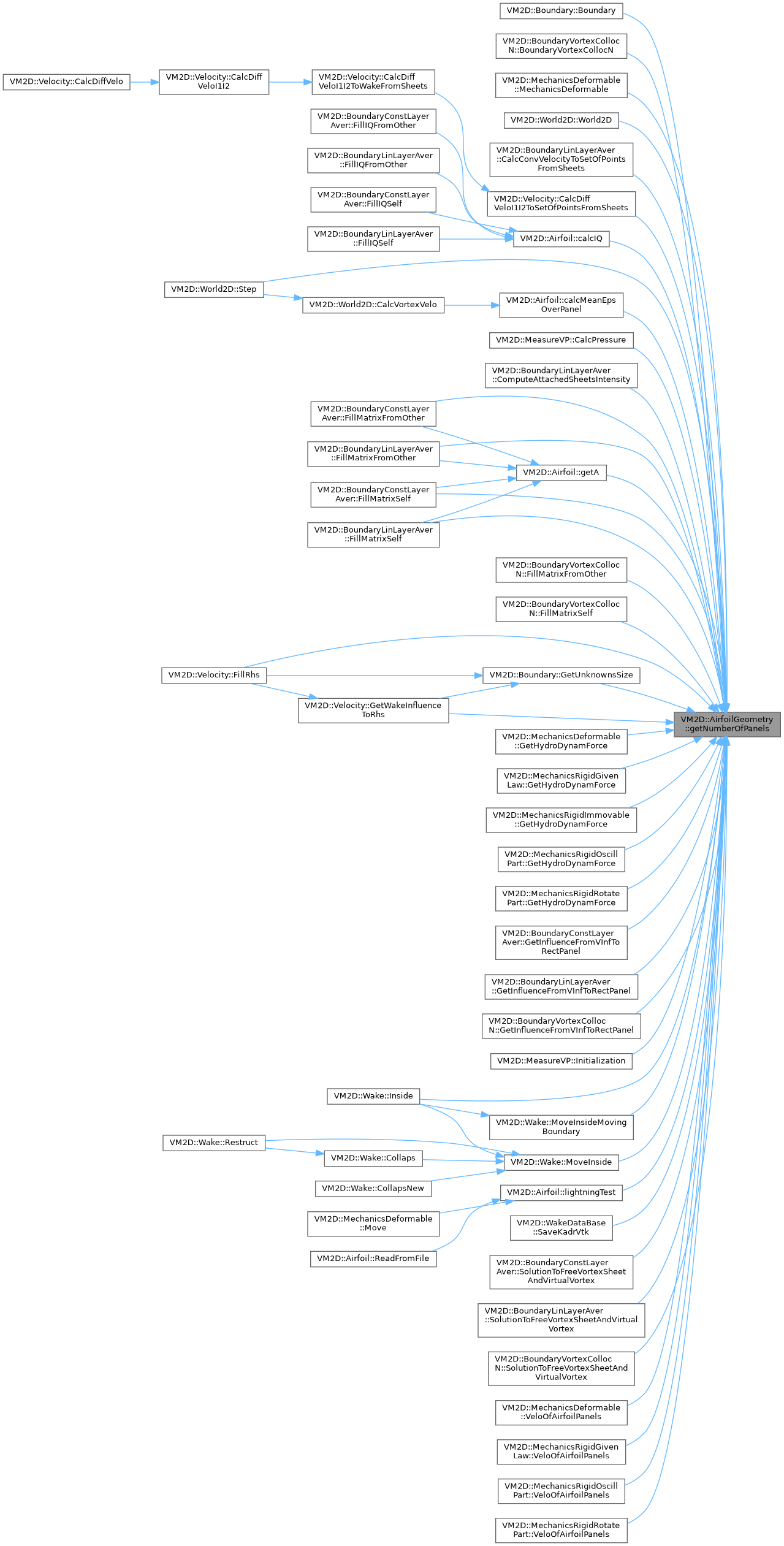
| size_t | getNumberOfPanels () const |
| Возврат количества панелей на профиле | |
Public Attributes | |
| const World2D & | W |
| Константная ссылка на решаемую задачу | |
| const size_t | numberInPassport |
| Номер профиля в паспорте | |
| double | m |
| Масса профиля | |
| double | J |
| Полярный момент инерции профиля относительно центра масс | |
| std::vector< std::vector< Point2D > > | possibleWays |
| Возможные пути внутри профиля от точки (0, 0) к центрам всех панелей | |
| std::vector< int > | wayToVertex |
| Номера путей к вершинам | |
| std::vector< double > | meanEpsOverPanel |
| Средние значения Eps на панелях | |
| std::vector< double > | viscousStress |
| Нейросеть для коэффициентов I0 и I3 диффузионной скорости | |
| Point2D | lowLeft |
| Левый нижний угол габаритного прямоугольника профиля | |
| Point2D | upRight |
| Правый верхний угол габаритного прямоугольника профиля | |
| std::vector< double > | gammaThrough |
| Суммарные циркуляции вихрей, пересекших панели профиля на прошлом шаге | |
| bool | inverse |
| Признак разворота нормалей (для расчета внутренних течений) | |
| std::vector< Point2D > | nrm |
| Нормали к панелям профиля | |
| std::vector< std::pair< Point2D, Point2D > > | psn |
| Псевдонормали к панелям профиля | |
| std::vector< Point2D > | tau |
| Касательные к панелям профиля | |
| std::vector< double > | len |
| Длины панелей профиля | |
| Point2D | rcm |
| Положение центра масс профиля | |
| double | phiAfl |
| Поворот профиля | |
| double | area |
| Площадь профиля | |
Protected Attributes | |
| std::vector< Point2D > | r_ |
| Координаты начал панелей | |
| std::vector< Point2D > | v_ |
| Скорости начал панелей | |
Абстрактный класс, определяющий обтекаемый профиль
Definition at line 181 of file Airfoil2D.h.
| Airfoil::Airfoil | ( | const World2D & | W_, |
| const size_t | numberInPassport_ | ||
| ) |
Конструктор
| [in] | W_ | константная ссылка на решаемую задачу |
| [in] | numberInPassport_ | номер профиля в паспорте задачи |
Definition at line 58 of file Airfoil2D.cpp.
|
inlinevirtual |
|
virtual |
Вычисление коэффициентов матрицы, состоящей из интегралов от (r-xi)/|r-xi|^2.
| [in] | p | размерность матрицы-результата |
| [in] | otherAirfoil | константная ссылка на профиль, от которого рассчитывается влияние |
| [out] | matrPair | ссылка на пару матриц, выражающих взаимные влияния (касательные и нормальные) панелей профиля return соответствующий блок матрицы СЛАУ, вытянутый в линию |
Definition at line 1180 of file Airfoil2D.cpp.
| void Airfoil::calcMeanEpsOverPanel | ( | ) |
Вычисление средних значений eps на панелях
Definition at line 93 of file Airfoil2D.cpp.

| void Airfoil::CalcNrmTauLen | ( | ) |
Вычисление нормалей, касательных и длин панелей по текущему положению вершин
Definition at line 1047 of file Airfoil2D.cpp.
|
virtual |
Вычисление коэффициентов матрицы A для расчета влияния панели на панель
| [in] | p | размерность матрицы - результата |
| [in] | i | номер панели, на которую оказывается влияние |
| [in] | airfoil | константная ссылка на профиль, от которого рассчитывается влияние |
| [in] | j | номер влияющей панели return соответствующий блок матрицы СЛАУ, вытянутый в линию |
Definition at line 1139 of file Airfoil2D.cpp.
|
virtual |
Вычисление числителей и знаменателей диффузионных скоростей в заданном наборе точек, обусловленных геометрией профиля, и вычисление вязкого трения
Вычисляет диффузионные скорости в наборе точек, которые обусловленных геометрией профиля, и вычисляет вязкое трение
| [in] | pointsDb | константная ссылка на базу данных вихрей, в которых вычисляются скорости |
| [in] | domainRadius | ссылка на радиусы вихрей |
| [out] | I0 | ссылка на вектор знаменателей диффузионных скоростей, которые приобретают точки из-за влияния геометрии профиля |
| [out] | I3 | ссылка на вектор числителей диффузионных скоростей, которые приобретают точки из-за влияния геометрии профиля |
Definition at line 492 of file Airfoil2D.cpp.

|
virtual |
Definition at line 631 of file Airfoil2D.cpp.

|
virtual |
Вычисляет габаритный прямоугольник профиля
Заполняет значения полей lowLeft и upRight по габаритному прямоугольнику профиля с учетом зазора
| [in] | gap | относительная величина зазора в долях от размера габаритного прямоугольника (по умолчанию 0.02, что соответствует 2 %) |
Definition at line 1027 of file Airfoil2D.cpp.
|
virtual |
Вычисление влияния слоя источников конкретной прямолинейной панели на вихрь в области течения
| [in] | panel | номер панели профиля, от которой считается влияние |
| [in] | vtx | ссылка на вихрь |
| [out] | vel | ссылка на вектор полученной скорости |
Definition at line 1326 of file Airfoil2D.cpp.

|
virtual |
Вычисление влияния части подряд идущих источников из области течения на панель для правой части
Вычисляет влияния части подряд идущих источников из области течения на панель для правой части
| [in] | panel | номер панели профиля, на которую считается влияние |
| [in] | ptr | указатель на начало диапазона источников |
| [in] | count | длина диапазона источников |
| [out] | panelRhs | ссылка на вектор полученного влияния для правой части СЛАУ для конкретной панели |
Definition at line 1320 of file Airfoil2D.cpp.

|
virtual |
Вычисление влияния набегающего потока на панель для правой части
Вычисляет влияния набегающего потока на панель для правой части
| [out] | vInfRhs | ссылка на вектор полученного влияния для правой части СЛАУ для всех панелей профиля |
Definition at line 1337 of file Airfoil2D.cpp.

|
virtual |
Вычисление влияния вихревых слоев (свободный + присоединенный) конкретной прямолинейной панели на вихрь в области течения
| [in] | panel | номер панели профиля, от которой считается влияние |
| [in] | vtx | ссылка на вихрь |
| [out] | vel | ссылка на вектор полученной скорости |
Definition at line 1332 of file Airfoil2D.cpp.

|
virtual |
Вычисление влияния части подряд идущих вихрей из вихревого следа на панель для правой части
Вычисляет влияния части подряд идущих вихрей из вихревого следа на панель для правой части
| [in] | panel | номер панели профиля, на которую считается влияние |
| [in] | ptr | указатель на начало диапазона вихрей |
| [in] | count | длина диапазона вихрей |
| [out] | panelRhs | ссылка на вектор полученного влияния для правой части СЛАУ для конкретной панели |
Definition at line 1313 of file Airfoil2D.cpp.

|
inlineinherited |
Возврат количества панелей на профиле
Definition at line 163 of file Airfoil2D.h.
|
inlineinherited |
Возврат константной ссылки на вершину профиля
Организовано "зацикливание" в сторону увеличения индекса, т.е. getR[size()] = getR[0];
Это позволяет удобно обращаться к getR(i) и getR(i+1) как к началу и концу i-й панели
| [in] | q | номер вершины профиля return константную ссылку на вершину профиля |
Definition at line 113 of file Airfoil2D.h.
|
inlineinherited |
Возврат константной ссылки на скорость вершины профиля
Организовано "зацикливание" в сторону увеличения индекса, т.е. getV[size()] = getV[0];
Это позволяет удобно обращаться к getV(i) и getV(i+1) как к скоростям начала и конца i-й панели
| [in] | q | номер вершины профиля return константную ссылку на скорость вершины профиля |
Definition at line 137 of file Airfoil2D.h.
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devAttachedSourceSheetLinPtr | ) |
Указатель на девайсе, где хранятся интенсивности (линейные) присоединенного слоя источников на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devAttachedSourceSheetPtr | ) |
Указатель на девайсе, где хранятся интенсивности (константные) присоединенного слоя источников на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devAttachedVortexSheetLinPtr | ) |
Указатель на девайсе, где хранятся интенсивности (линейные) присоединенного вихревого слоя на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devAttachedVortexSheetPtr | ) |
Указатель на девайсе, где хранятся интенсивности (константные) присоединенного вихревого слоя на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devFreeVortexSheetLinPtr | ) |
Указатель на девайсе, где хранятся интенсивности (линейные) свободного вихревого слоя на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devFreeVortexSheetPtr | ) |
Указатель на девайсе, где хранятся интенсивности (константные) свободного вихревого слоя на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devMeanEpsOverPanelPtr | ) |
Указатель на девайсе, где хранятся средние eps на панелях
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devPsnPtr | ) |
Указатель на девайсе, где хранятся псевдонормали профиля
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devRhsLinPtr | ) |
Указатель на девайсе, где хранится правая часть (линейная) матрицы
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devRhsPtr | ) |
Указатель на девайсе, где хранится правая часть (константная) матрицы
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devRPtr | ) |
Указатель на девайсе, где хранятся вершины профиля
| VM2D::Airfoil::IFCUDA | ( | mutable double * | devViscousStressesPtr | ) |
Указатель на девайсе, где хранится вектор (по панелям) для силы вязкого трения
| VM2D::Airfoil::IFCUDA | ( | mutable std::vector< double > | tmpRhs | ) |
Указатель на хосте, где хранится временная часть матрицы, полученная с девайса
| VM2D::Airfoil::IFCUDA | ( | mutable std::vector< double > | tmpViscousStresses | ) |
Указатель на хосте, где хранится временная часть вектора (по панелям) для силы вязкого трения
| bool Airfoil::isAfter | ( | size_t | i, |
| size_t | j | ||
| ) | const |
Проверка, идет ли вершина i следом за вершиной j.
| [in] | i | проверяемая вершина |
| [in] | j | контрольная вершина |
Definition at line 73 of file Airfoil2D.cpp.
| bool Airfoil::isInsideGabarits | ( | const Point2D & | r | ) | const |
Определяет, находится ли точка с радиус-вектором \( \vec r \) внутри габаритного прямоугольника профиля
| [in] | r | константная ссылка на текущее положение точки |
Definition at line 80 of file Airfoil2D.cpp.
| bool Airfoil::isOutsideGabarits | ( | const Point2D & | r | ) | const |
Определяет, находится ли точка с радиус-вектором \( \vec r \) вне габаритного прямоугольника профиля
| [in] | r | константная ссылка на текущее положение точки |
Definition at line 87 of file Airfoil2D.cpp.
|
virtual |
Определяет, находится ли точка с радиус-вектором \( \vec r \) внутри профиля
| [in] | point | константная ссылка на текущее положение точки |
Definition at line 1007 of file Airfoil2D.cpp.

| void Airfoil::lightningTest | ( | ) |
Тест на "отвещенность".
Definition at line 117 of file Airfoil2D.cpp.
|
virtual |
Перемещение профиля
Плоскопараллельно перемещает профиль на вектор \( \overrightarrow{dr} \)
| [in] | dr | константная ссылка на вектор перемещения |
Definition at line 1086 of file Airfoil2D.cpp.

|
virtual |
Считывание профиля из файла
Считывание геометрии профиля из файла, вычисление всех прочих параметров профиля
После загрузки из файла профиль поворачивается на нужный угол и масштабируется на нужный коэффициент
| [in] | dir | константная ссылка на строку — имя каталога, где лежит cчитываемый файл |
Definition at line 209 of file Airfoil2D.cpp.
|
virtual |
Поворот профиля
Поворачивает профиль на угол \( \alpha \) вокруг центра масс
| [in] | alpha | угол поворота против часовой стрелки в радианах |
Definition at line 1101 of file Airfoil2D.cpp.

|
virtual |
Масштабирование профиля
Масштабирует профиль в factor раз относительно центра масс
| [in] | factor | масштабный коэффициент |
Definition at line 1122 of file Airfoil2D.cpp.


|
inlineinherited |
Возврат ссылки на вершину профиля
Организовано "зацикливание" в сторону увеличения индекса, т.е. getR[size()] = getR[0];
Это позволяет удобно обращаться к getR(i) и getR(i+1) как к началу и концу i-й панели
| [in] | q | номер вершины профиля return ссылку на вершину профиля |
Definition at line 125 of file Airfoil2D.h.

|
inlineinherited |
Установка постоянной скорости всех вершин профиля
| [in] | vel | константная ссылка на величину устанавливаемой скорости |
Definition at line 145 of file Airfoil2D.h.
|
inlineinherited |
Установка скоростей всех вершин профиля
| [in] | vel | константная ссылка на вектор величин скоростей вершин профиля |
Definition at line 154 of file Airfoil2D.h.
|
inherited |
Площадь профиля
Definition at line 103 of file Airfoil2D.h.
| std::vector<double> VM2D::Airfoil::gammaThrough |
Суммарные циркуляции вихрей, пересекших панели профиля на прошлом шаге
Используются в правой части системы, чтобы компенсировать вихри, проникшие в профиль
Definition at line 276 of file Airfoil2D.h.
|
inherited |
Признак разворота нормалей (для расчета внутренних течений)
Definition at line 76 of file Airfoil2D.h.
| double VM2D::Airfoil::J |
Полярный момент инерции профиля относительно центра масс
Definition at line 196 of file Airfoil2D.h.
|
inherited |
Длины панелей профиля
Definition at line 94 of file Airfoil2D.h.
| Point2D VM2D::Airfoil::lowLeft |
Левый нижний угол габаритного прямоугольника профиля
Definition at line 270 of file Airfoil2D.h.
| double VM2D::Airfoil::m |
Масса профиля
Definition at line 193 of file Airfoil2D.h.
| std::vector<double> VM2D::Airfoil::meanEpsOverPanel |
Средние значения Eps на панелях
Definition at line 209 of file Airfoil2D.h.
|
inherited |
Нормали к панелям профиля
Нормали задаются внешними, нормированными на единицу
Definition at line 81 of file Airfoil2D.h.
| const size_t VM2D::Airfoil::numberInPassport |
Номер профиля в паспорте
Definition at line 188 of file Airfoil2D.h.
|
inherited |
Поворот профиля
Definition at line 100 of file Airfoil2D.h.
| std::vector<std::vector<Point2D> > VM2D::Airfoil::possibleWays |
Возможные пути внутри профиля от точки (0, 0) к центрам всех панелей
Definition at line 199 of file Airfoil2D.h.
Псевдонормали к панелям профиля
Псевдонормали к началу и концу панели, нормированные на единицу
Definition at line 86 of file Airfoil2D.h.
|
protectedinherited |
Координаты начал панелей
Definition at line 69 of file Airfoil2D.h.
|
inherited |
Положение центра масс профиля
Definition at line 97 of file Airfoil2D.h.
|
inherited |
Касательные к панелям профиля
Касательные соответствуют обходу профиля против часовой стрелки, задаются нормированными на единицу
Definition at line 91 of file Airfoil2D.h.
| Point2D VM2D::Airfoil::upRight |
Правый верхний угол габаритного прямоугольника профиля
Definition at line 271 of file Airfoil2D.h.
|
protectedinherited |
Скорости начал панелей
Definition at line 72 of file Airfoil2D.h.
| std::vector<double> VM2D::Airfoil::viscousStress |
Нейросеть для коэффициентов I0 и I3 диффузионной скорости
Касательные напряжения на панелях профиля
Definition at line 268 of file Airfoil2D.h.
| const World2D& VM2D::Airfoil::W |
Константная ссылка на решаемую задачу
Definition at line 185 of file Airfoil2D.h.
| std::vector<int> VM2D::Airfoil::wayToVertex |
Номера путей к вершинам
Definition at line 202 of file Airfoil2D.h.