|
VM2D 1.14
Vortex methods for 2D flows simulation
|
|
VM2D 1.14
Vortex methods for 2D flows simulation
|
Абстрактный класс, определяющий способ вычисления скоростей More...
#include <Velocity2D.h>
Public Member Functions | |
| Velocity (const World2D &W_) | |
| Конструктор | |
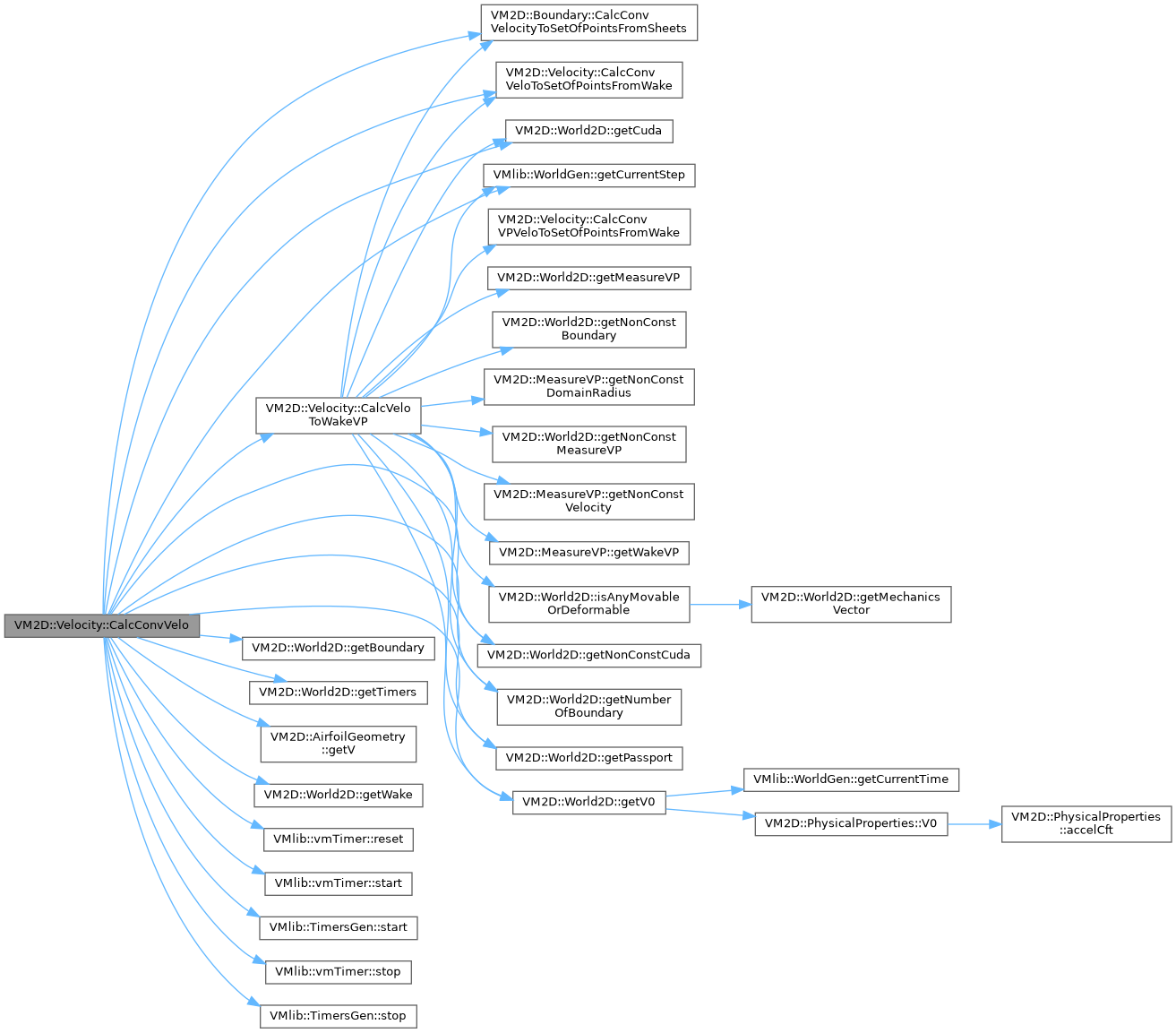
| void | CalcConvVelo () |
| Вычисление конвективных скоростей вихрей и виртуальных вихрей в вихревом следе, а также в точках wakeVP. | |
| virtual void | CalcConvVeloToSetOfPointsFromWake (const WakeDataBase &pointsDb, std::vector< Point2D > &velo, std::vector< double > &domainRadius, bool calcVelo, bool calcRadius)=0 |
| Вычисление конвективных скоростей и радиусов вихревых доменов в заданном наборе точек от следа | |
| virtual void | CalcConvVPVeloToSetOfPointsFromWake (const WakeDataBase &pointsDb, std::vector< Point2D > &velo, std::vector< double > &domainRadius, bool calcVelo, bool calcRadius) |
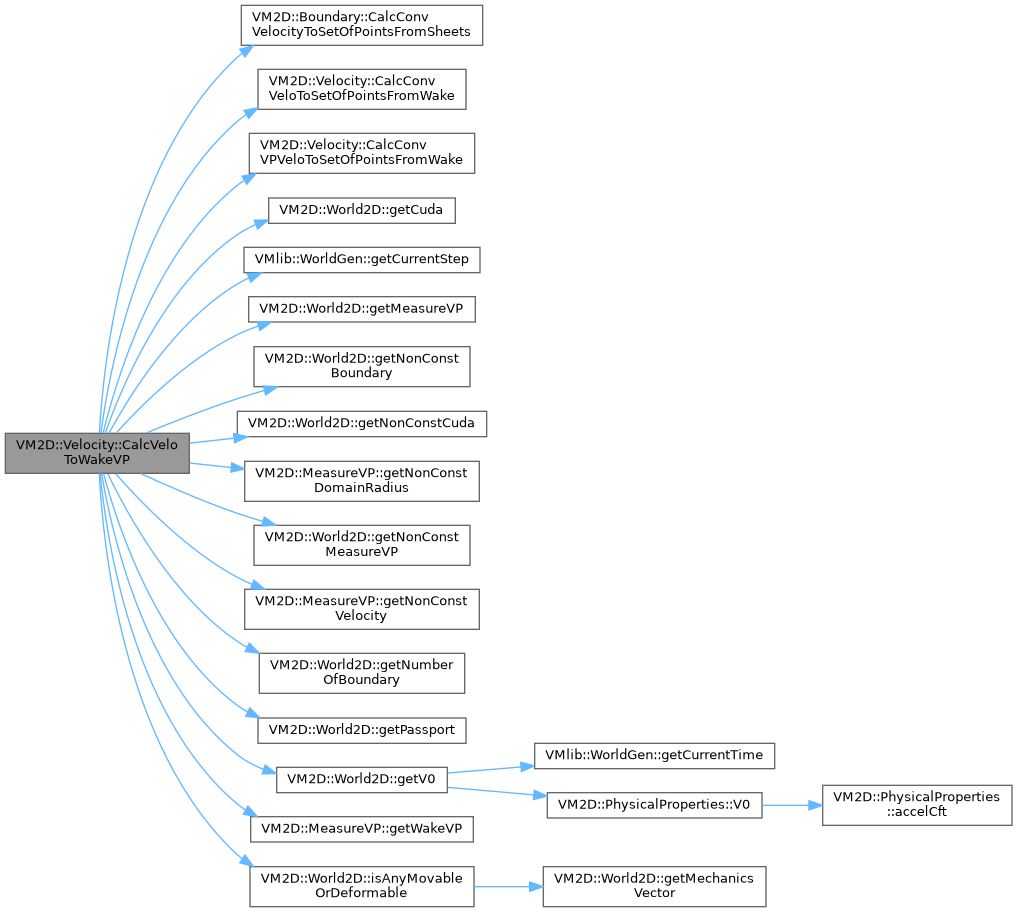
| virtual void | CalcVeloToWakeVP () |
| Вычисление скоростей в точках wakeVP. | |
| void | CalcDiffVeloI1I2ToSetOfPointsFromWake (const WakeDataBase &pointsDb, const std::vector< double > &domainRadius, const WakeDataBase &vorticesDb, std::vector< double > &I1, std::vector< Point2D > &I2) |
| Вычисление числителей и знаменателей диффузионных скоростей в заданном наборе точек | |
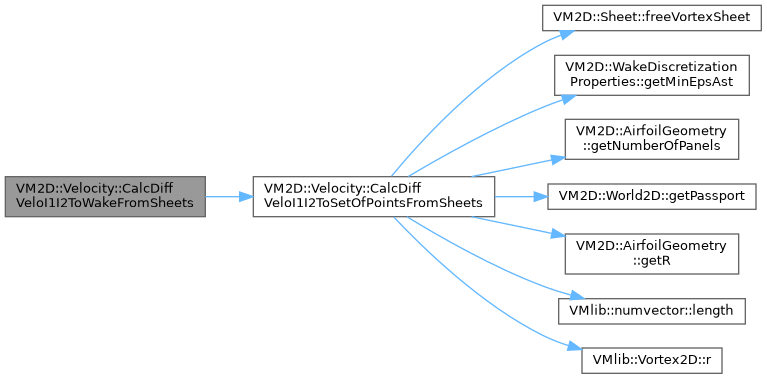
| void | CalcDiffVeloI1I2ToSetOfPointsFromSheets (const WakeDataBase &pointsDb, const std::vector< double > &domainRadius, const Boundary &bnd, std::vector< double > &I1, std::vector< Point2D > &I2) |
| void | CalcDiffVeloI1I2ToWakeFromSheets (const WakeDataBase &pointsDb, const std::vector< double > &domainRadius, const Boundary &bnd, std::vector< double > &I1, std::vector< Point2D > &I2) |
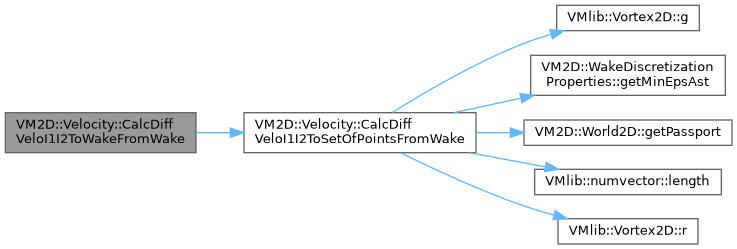
| void | CalcDiffVeloI1I2ToWakeFromWake (const WakeDataBase &pointsDb, const std::vector< double > &domainRadius, const WakeDataBase &vorticesDb, std::vector< double > &I1, std::vector< Point2D > &I2) |
| void | CalcDiffVeloI1I2 () |
| Вычисление диффузионных скоростей вихрей и виртуальных вихрей в вихревом следе | |
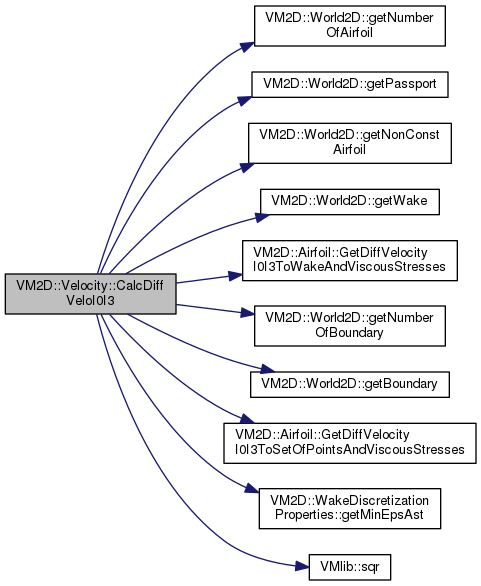
| void | CalcDiffVeloI0I3 () |
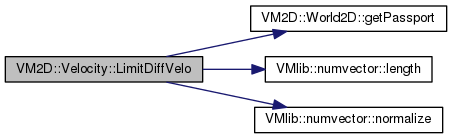
| void | LimitDiffVelo (std::vector< Point2D > &diffVel) |
| Контроль больших значений диффузионных скоростей | |
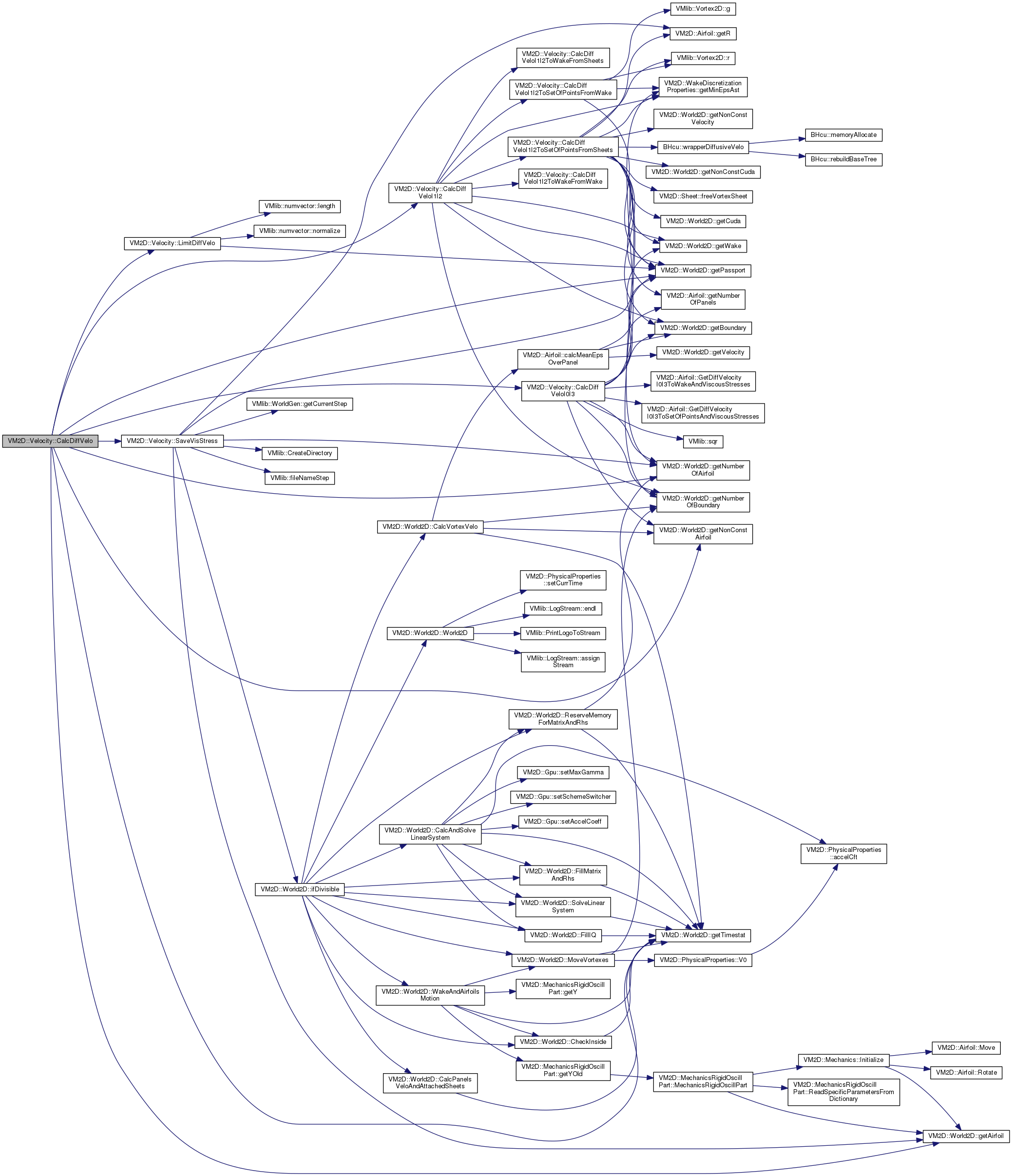
| void | CalcDiffVelo () |
| Вычисление диффузионных скоростей | |
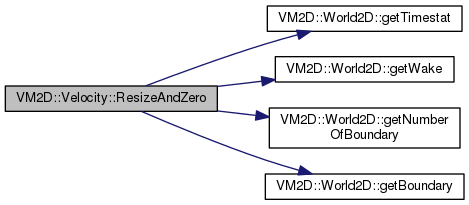
| void | ResizeAndZero () |
| Очистка старых массивов под хранение скоростей, выделение новой памяти и обнуление | |
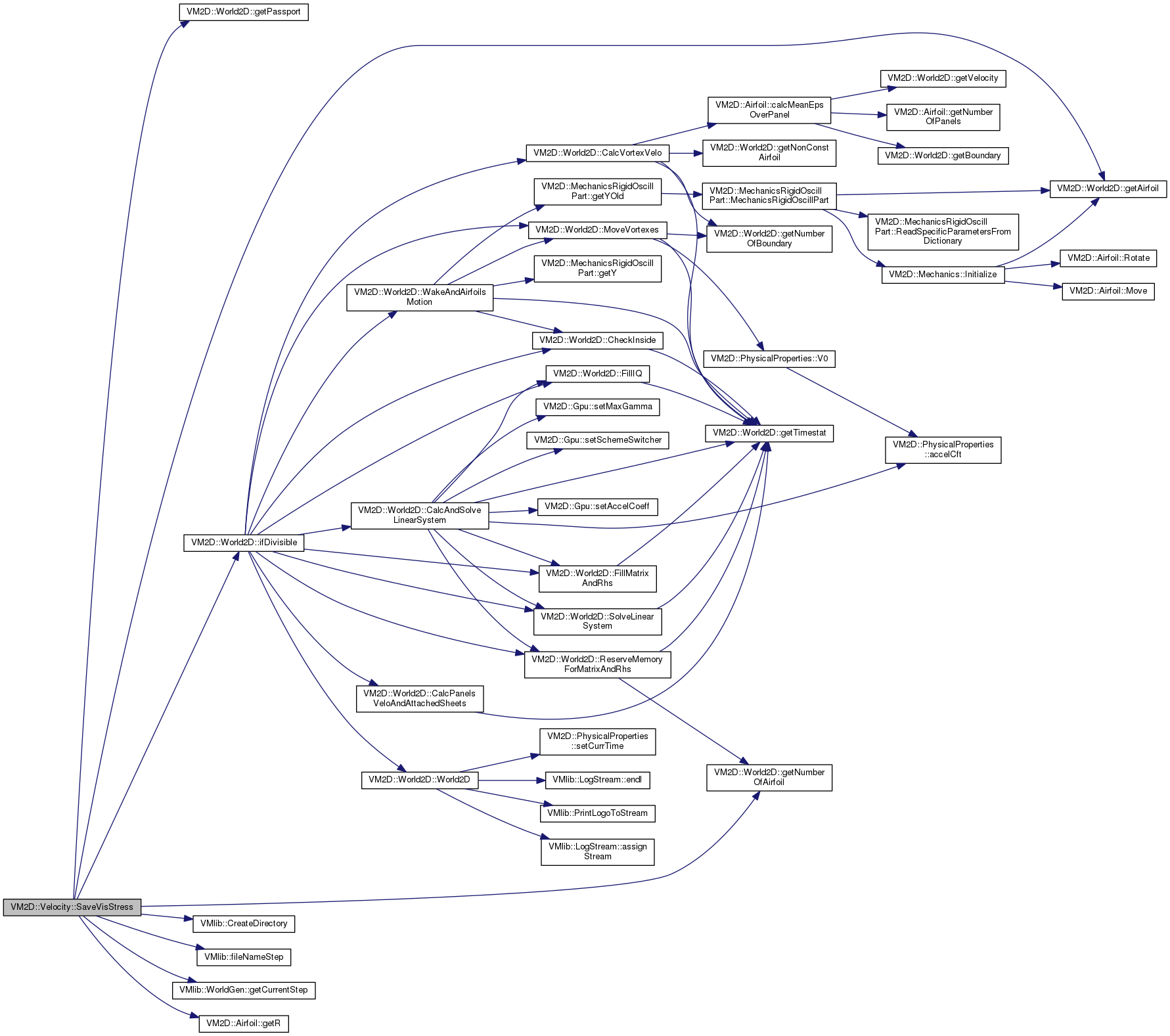
| void | SaveVisStress () |
| Сохранение вязких напряжений | |
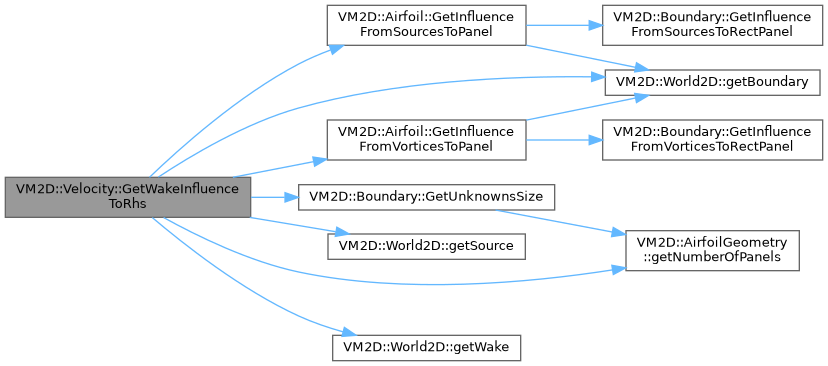
| void | GetWakeInfluenceToRhs (const Airfoil &afl, std::vector< double > &wakeRhs) const |
| Генерация вектора влияния вихревого следа на профиль | |
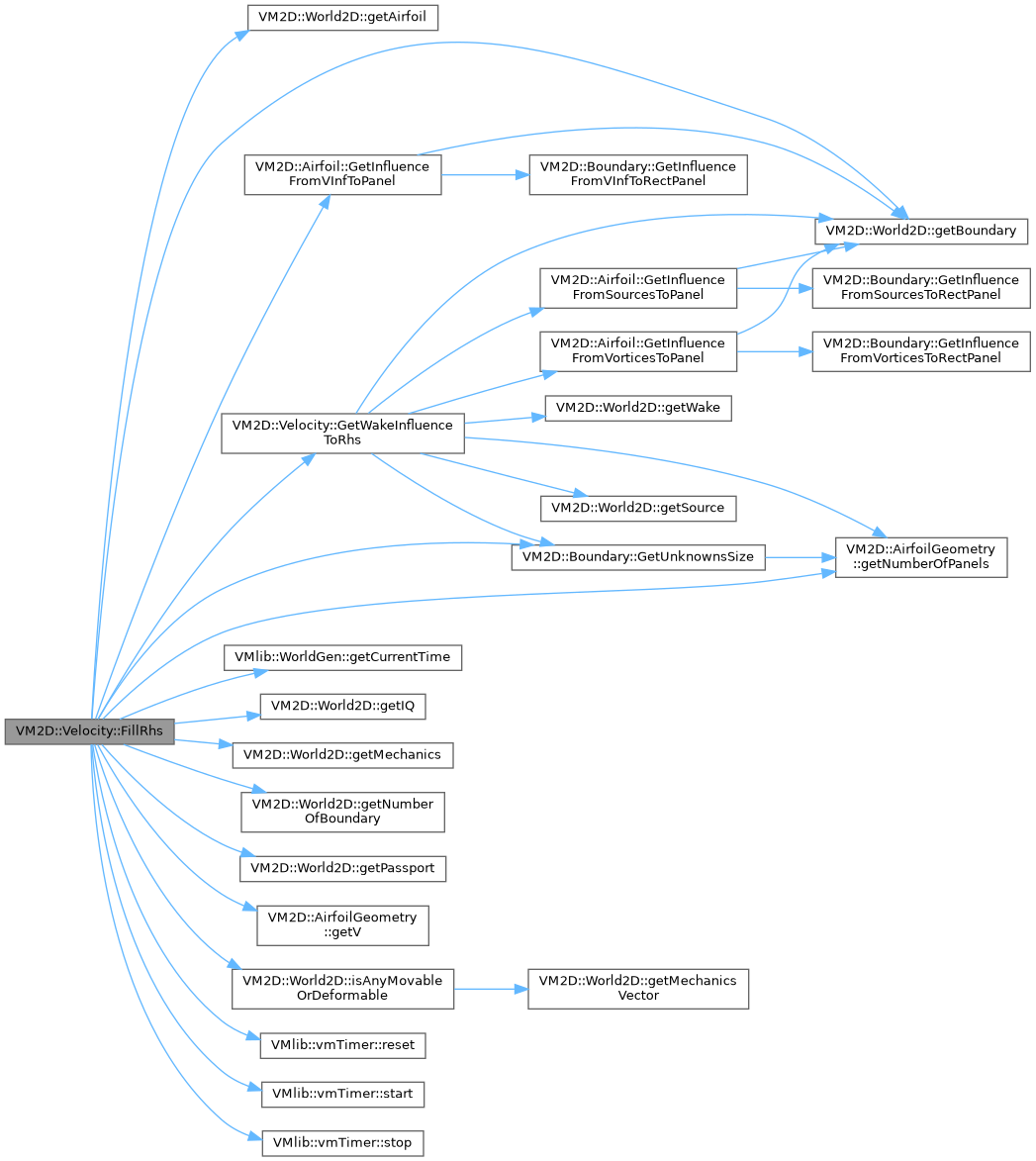
| void | FillRhs (Eigen::VectorXd &rhsReord) const |
| virtual | ~Velocity () |
| Деструктор | |
Public Attributes | |
| VortexesParams | wakeVortexesParams |
| Струтура, определяющая параметры вихрей в следе | |
| std::vector< VortexesParams > | virtualVortexesParams |
| Вектор струтур, определяющий параметры виртуальных вихрей для профилей | |
| OptimizedVelocity | optimizedVelocity |
Protected Attributes | |
| const World2D & | W |
| Константная ссылка на решаемую задачу | |
Абстрактный класс, определяющий способ вычисления скоростей
\Version 1.14
Definition at line 104 of file Velocity2D.h.
|
inline |
Конструктор
| [in] | W_ | константная ссылка на решаемую задачу |
Definition at line 122 of file Velocity2D.h.
|
inlinevirtual |
| void Velocity::CalcConvVelo | ( | ) |
Вычисление конвективных скоростей вихрей и виртуальных вихрей в вихревом следе, а также в точках wakeVP.
Definition at line 888 of file Velocity2D.cpp.
|
pure virtual |
Вычисление конвективных скоростей и радиусов вихревых доменов в заданном наборе точек от следа
| [in] | pointsDb | константная ссылка на базу данных пелены из вихрей, в которых надо сосчитать конвективные скорости |
| [out] | velo | ссылка на вектор скоростей в требуемых точках |
| [out] | domainRadius | ссылка на вектор радиусов вихревых доменов |
| [in] | calcVelo | признак вычисления скоростей в точках |
| [in] | calcRadius | признак вычисления радиусов доменов |
Implemented in VM2D::VelocityBarnesHut, and VM2D::VelocityBiotSavart.

|
inlinevirtual |
Reimplemented in VM2D::VelocityBarnesHut.
Definition at line 141 of file Velocity2D.h.

| void Velocity::CalcDiffVelo | ( | ) |
Вычисление диффузионных скоростей
Вызывается в CalcVortexVelo()
Definition at line 148 of file Velocity2D.cpp.
| void Velocity::CalcDiffVeloI0I3 | ( | ) |
Definition at line 99 of file Velocity2D.cpp.

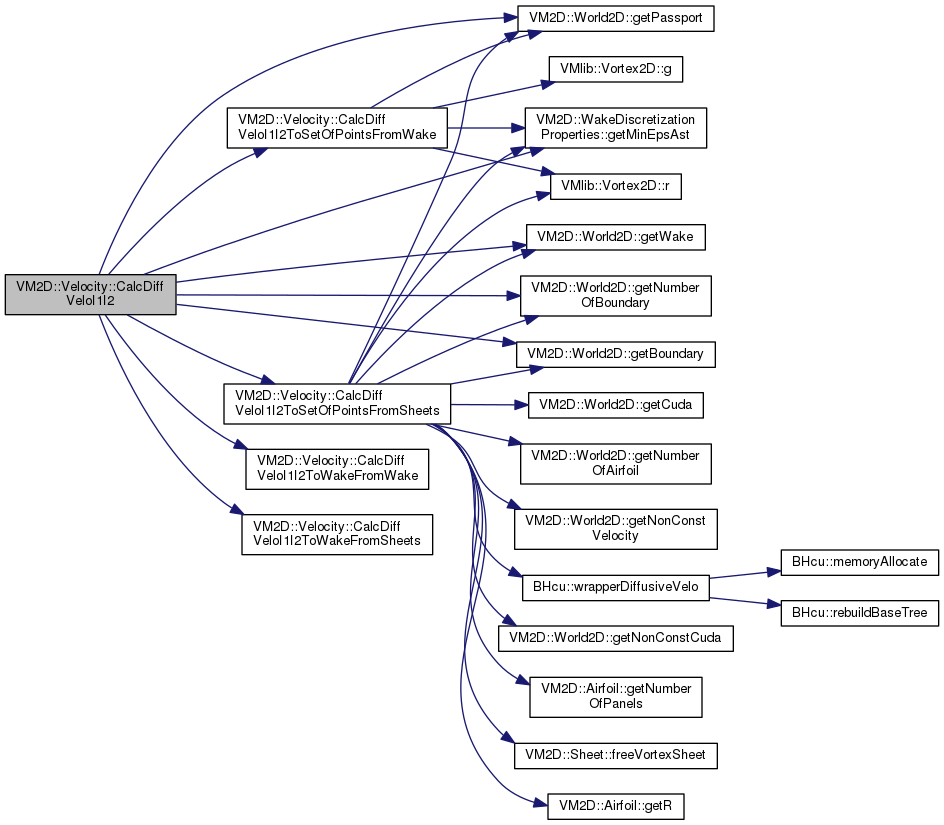
| void Velocity::CalcDiffVeloI1I2 | ( | ) |
Вычисление диффузионных скоростей вихрей и виртуальных вихрей в вихревом следе
Вызывает 4 раза функцию CalcDiffVeloToSetOfPoints
Definition at line 55 of file Velocity2D.cpp.

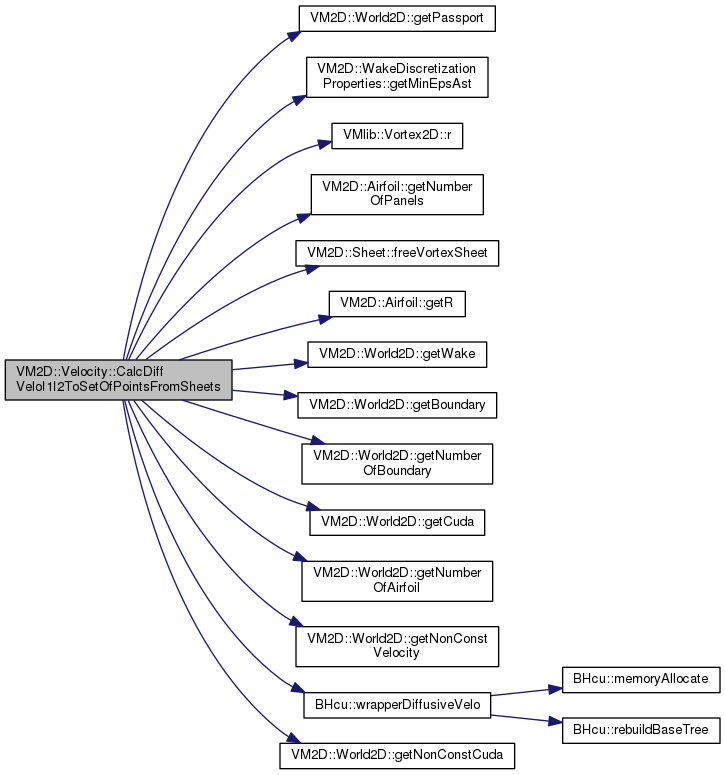
| void Velocity::CalcDiffVeloI1I2ToSetOfPointsFromSheets | ( | const WakeDataBase & | pointsDb, |
| const std::vector< double > & | domainRadius, | ||
| const Boundary & | bnd, | ||
| std::vector< double > & | I1, | ||
| std::vector< Point2D > & | I2 | ||
| ) |
Definition at line 264 of file Velocity2D.cpp.

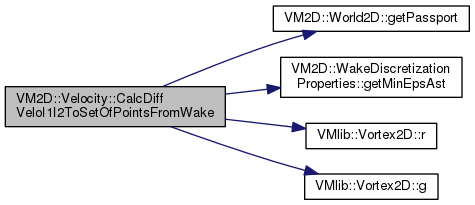
| void Velocity::CalcDiffVeloI1I2ToSetOfPointsFromWake | ( | const WakeDataBase & | pointsDb, |
| const std::vector< double > & | domainRadius, | ||
| const WakeDataBase & | vorticesDb, | ||
| std::vector< double > & | I1, | ||
| std::vector< Point2D > & | I2 | ||
| ) |
Вычисление числителей и знаменателей диффузионных скоростей в заданном наборе точек
| [in] | pointsDb | константная ссылка на базу данных пелены из вихрей, в которых надо сосчитать диффузионные скорости |
| [in] | domainRadius | константная ссылка на вектор радиусов вихревых доменов |
| [in] | vorticesDb | константная ссылка на на базу данных пелены из вихрей,от которых надо сосчитать влияния на points |
| [out] | I1 | ссылка на вектор величин I1 (знаменателей в диффузионных скоростях) в требуемых точках |
| [out] | I2 | ссылка на вектор величин I2 (числителей в диффузионных скоростях) в требуемых точках |
Definition at line 206 of file Velocity2D.cpp.

| void Velocity::CalcDiffVeloI1I2ToWakeFromSheets | ( | const WakeDataBase & | pointsDb, |
| const std::vector< double > & | domainRadius, | ||
| const Boundary & | bnd, | ||
| std::vector< double > & | I1, | ||
| std::vector< Point2D > & | I2 | ||
| ) |
Definition at line 1093 of file Velocity2D.cpp.

| void Velocity::CalcDiffVeloI1I2ToWakeFromWake | ( | const WakeDataBase & | pointsDb, |
| const std::vector< double > & | domainRadius, | ||
| const WakeDataBase & | vorticesDb, | ||
| std::vector< double > & | I1, | ||
| std::vector< Point2D > & | I2 | ||
| ) |
Definition at line 1088 of file Velocity2D.cpp.

|
virtual |
Вычисление скоростей в точках wakeVP.
Definition at line 1013 of file Velocity2D.cpp.

| void Velocity::FillRhs | ( | Eigen::VectorXd & | rhsReord | ) | const |
!!!!!!!!!!влияние присоединенных слоев от самого себя и от других профилей
Definition at line 781 of file Velocity2D.cpp.
| void Velocity::GetWakeInfluenceToRhs | ( | const Airfoil & | afl, |
| std::vector< double > & | wakeRhs | ||
| ) | const |
Генерация вектора влияния вихревого следа на профиль
Генерирует вектор влияния вихревого следа на профиль, используемый затем для расчета вектора правой части.
| [in] | afl | константная ссылка на профиль, правая часть для которого вычисляется |
| [out] | wakeRhs | ссылка на вектор влияния вихревого следа на ОДИН профиль |
Definition at line 612 of file Velocity2D.cpp.

| void Velocity::LimitDiffVelo | ( | std::vector< Point2D > & | diffVel | ) |
Контроль больших значений диффузионных скоростей
| [in,out] | diffVel | ссылка на вектор диффузионных скоростей |
Definition at line 136 of file Velocity2D.cpp.

| void Velocity::ResizeAndZero | ( | ) |
Очистка старых массивов под хранение скоростей, выделение новой памяти и обнуление
Вызывается в CalcVortexVelo() на каждом шаге расчета перед непосредственно расчетом скоростей
Definition at line 516 of file Velocity2D.cpp.
| void Velocity::SaveVisStress | ( | ) |
Сохранение вязких напряжений
Вызывается в CalcDiffVelo()
Definition at line 580 of file Velocity2D.cpp.
| OptimizedVelocity VM2D::Velocity::optimizedVelocity |
Definition at line 117 of file Velocity2D.h.
| std::vector<VortexesParams> VM2D::Velocity::virtualVortexesParams |
Вектор струтур, определяющий параметры виртуальных вихрей для профилей
Definition at line 115 of file Velocity2D.h.
|
protected |
Константная ссылка на решаемую задачу
Definition at line 108 of file Velocity2D.h.
| VortexesParams VM2D::Velocity::wakeVortexesParams |
Струтура, определяющая параметры вихрей в следе
Definition at line 112 of file Velocity2D.h.