|
VM2D 1.14
Vortex methods for 2D flows simulation
|
|
VM2D 1.14
Vortex methods for 2D flows simulation
|
Класс, определяющий вид механической системы More...
#include <Mechanics2DDeformable.h>

Public Member Functions | |
| Point2D & | getVcm () |
| текущая скорость профиля | |
| Point2D & | getRcm () |
| текущее отклонение профиля | |
| double & | getWcm () |
| текущая угловая скорость профиля | |
| double & | getPhicm () |
| текущий угол поворота профиля | |
| MechanicsDeformable (const World2D &W_, size_t numberInPassport_) | |
| Конструктор | |
| ~MechanicsDeformable () | |
| Деструктор | |
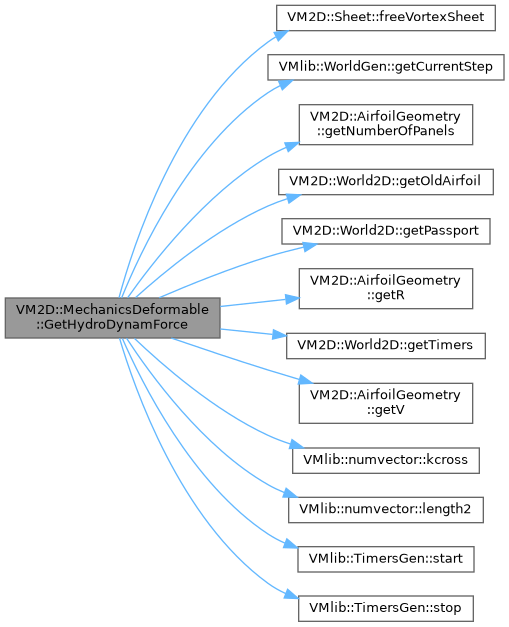
| virtual void | GetHydroDynamForce () override |
| Вычисление гидродинамической силы, действующей на профиль | |
| virtual Point2D | VeloOfAirfoilRcm (double currTime) override |
| Вычисление скорости центра масс профиля | |
| virtual Point2D | PositionOfAirfoilRcm (double currTime) override |
| Вычисление положения центра масс профиля | |
| virtual double | AngularVelocityOfAirfoil (double currTime) override |
| Вычисление угловой скорости профиля | |
| virtual double | AngleOfAirfoil (double currTime) override |
| Вычисление угла поворота профиля | |
| virtual void | VeloOfAirfoilPanels (double currTime) override |
| Вычисление скоростей начал панелей | |
| virtual void | ReadSpecificParametersFromDictionary () override |
| Чтение параметров конкретной механической системы | |
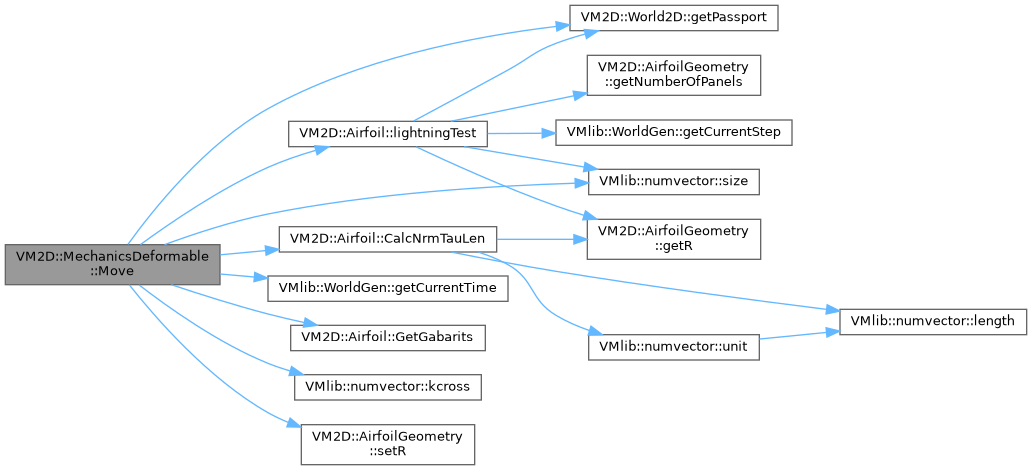
| virtual void | Move () override |
| Перемещение профиля в соответствии с законом | |
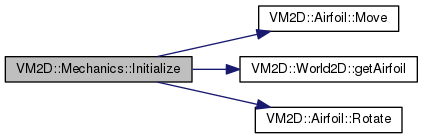
| void | Initialize (Point2D Vcm0_, Point2D Rcm0_, double Wcm0_, double Phi0_) |
| Задание начального положения и начальной скорости | |
| void | GenerateForcesHeader () |
| Генерация заголовка файла нагрузок | |
| void | GeneratePositionHeader () |
| Генерация заголовка файла положения профиля | |
| void | GenerateForcesString () |
| Сохранение строки со статистикой в файл нагрузок | |
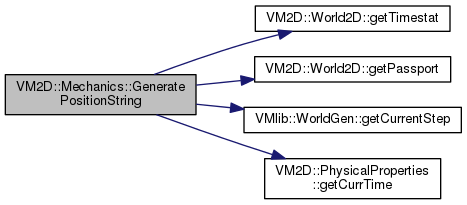
| void | GeneratePositionString () |
| Сохранение строки со статистикой в файл нагрузок | |
Public Attributes | |
| size_t | indexOfUpperRightAngle |
| хорда | |
| size_t | indexOfUpperLeftAngle |
| size_t | indexOfLowerRightAngle |
| size_t | indexOfLowerLeftAngle |
| std::vector< ChordPanel > | initialChord |
| std::vector< ChordPanel > | chord |
| std::vector< double > | upperShifts |
| std::vector< double > | lowerShifts |
| std::unique_ptr< Beam > | beam |
| std::vector< std::vector< Point2D > > | initialPossibleWays |
| Point2D | Vcm0 |
| Начальная скорость центра и угловая скорость | |
| double | Wcm0 |
| Point2D | Rcm0 |
| Начальное положение профиля | |
| double | Phi0 |
| Point2D | Vcm |
| Текущие скорость центра и угловая скорость | |
| double | Wcm |
| Point2D | Rcm |
| Текущие положение профиля | |
| double | Phi |
| Point2D | VcmOld |
| Скорость и отклонение с предыдущего шага | |
| double | WcmOld |
| Point2D | RcmOld |
| Текущие положение профиля | |
| double | PhiOld |
| double | circulation |
| Текущая циркуляция скорости по границе профиля | |
| double | circulationOld |
| Циркуляция скорости по границе профиля с предыдущего шага | |
| const bool | isMoves |
| Переменная, отвечающая за то, двигается профиль или нет | |
| const bool | isDeform |
| Переменная, отвечающая за то, деформируется профиль или нет | |
| Point2D | hydroDynamForce |
| Вектор гидродинамической силы и момент, действующие на профиль | |
| double | hydroDynamMoment |
| Point2D | viscousForce |
| Вектор силы и момент вязкого трения, действующие на профиль | |
| double | viscousMoment |
Protected Attributes | |
| const World2D & | W |
| Константная ссылка на решаемую задачу | |
| const size_t | numberInPassport |
| Номер профиля в паспорте | |
| Airfoil & | afl |
| const Boundary & | boundary |
| const VortexesParams & | virtVortParams |
| std::unique_ptr< VMlib::StreamParser > | mechParamsParser |
| Умный указатель на парсер параметров механической системы | |
Private Member Functions | |
| void | ReadParametersFromDictionary () |
| Парсинг списка параметров механической системы | |
Private Attributes | |
| double | deformParam |
| bool | fsi |
Класс, определяющий вид механической системы
Деформируемое твердое тело
Definition at line 129 of file Mechanics2DDeformable.h.
| MechanicsDeformable::MechanicsDeformable | ( | const World2D & | W_, |
| size_t | numberInPassport_ | ||
| ) |
Конструктор
| [in] | W_ | константная ссылка на решаемую задачу |
| [in] | numberInPassport_ | номер профиля в паспорте задачи |
Definition at line 163 of file Mechanics2DDeformable.cpp.

|
inline |
|
overridevirtual |
Вычисление угла поворота профиля
| [in] | currTime | текущее время |
Implements VM2D::Mechanics.
Definition at line 408 of file Mechanics2DDeformable.cpp.
|
overridevirtual |
Вычисление угловой скорости профиля
| [in] | currTime | текущее время |
Implements VM2D::Mechanics.
Definition at line 403 of file Mechanics2DDeformable.cpp.
|
inherited |
Генерация заголовка файла нагрузок
Definition at line 125 of file Mechanics2D.cpp.
|
inherited |
Сохранение строки со статистикой в файл нагрузок
Definition at line 183 of file Mechanics2D.cpp.

|
inherited |
Генерация заголовка файла положения профиля
Definition at line 156 of file Mechanics2D.cpp.
|
inherited |
Сохранение строки со статистикой в файл нагрузок
Definition at line 238 of file Mechanics2D.cpp.

|
overridevirtual |
Вычисление гидродинамической силы, действующей на профиль
Implements VM2D::Mechanics.
Definition at line 322 of file Mechanics2DDeformable.cpp.
|
inline |
|
inline |
|
inline |
|
inline |
Задание начального положения и начальной скорости
| [in] | Vcm0_ | - скорость центра масс |
| [in] | Rcm0_ | - положение центра масс |
| [in] | Wcm0_ | - угловая скорость центра масс |
| [in] | Phi0_ | - угол поворота центра масс |
Definition at line 92 of file Mechanics2D.cpp.

|
overridevirtual |
Перемещение профиля в соответствии с законом
Implements VM2D::Mechanics.
Definition at line 444 of file Mechanics2DDeformable.cpp.
|
overridevirtual |
Вычисление положения центра масс профиля
| [in] | currTime | текущее время |
Implements VM2D::Mechanics.
Definition at line 398 of file Mechanics2DDeformable.cpp.
|
privateinherited |
Парсинг списка параметров механической системы
Definition at line 116 of file Mechanics2D.cpp.

|
overridevirtual |
Чтение параметров конкретной механической системы
Implements VM2D::Mechanics.

|
overridevirtual |
Вычисление скоростей начал панелей
| [in] | currTime | текущее время |
Implements VM2D::Mechanics.
Definition at line 420 of file Mechanics2DDeformable.cpp.
|
overridevirtual |
Вычисление скорости центра масс профиля
| [in] | currTime | текущее время |
Implements VM2D::Mechanics.
Definition at line 392 of file Mechanics2DDeformable.cpp.
|
protectedinherited |
Константная ссылка на профиль
инициализируется автоматом в конструкторе, при помощи const_cast
Definition at line 87 of file Mechanics2D.h.
| std::unique_ptr<Beam> VM2D::MechanicsDeformable::beam |
Definition at line 182 of file Mechanics2DDeformable.h.
|
protectedinherited |
Константная ссылка на граничное условие
инициализируется автоматом в конструкторе
Definition at line 91 of file Mechanics2D.h.
| std::vector<ChordPanel> VM2D::MechanicsDeformable::chord |
Definition at line 178 of file Mechanics2DDeformable.h.
|
inherited |
Текущая циркуляция скорости по границе профиля
Definition at line 121 of file Mechanics2D.h.
|
inherited |
Циркуляция скорости по границе профиля с предыдущего шага
Definition at line 124 of file Mechanics2D.h.
|
private |
Definition at line 133 of file Mechanics2DDeformable.h.
|
private |
Definition at line 134 of file Mechanics2DDeformable.h.
|
inherited |
Вектор гидродинамической силы и момент, действующие на профиль
Definition at line 134 of file Mechanics2D.h.
|
inherited |
Definition at line 135 of file Mechanics2D.h.
| size_t VM2D::MechanicsDeformable::indexOfLowerLeftAngle |
Definition at line 175 of file Mechanics2DDeformable.h.
| size_t VM2D::MechanicsDeformable::indexOfLowerRightAngle |
Definition at line 174 of file Mechanics2DDeformable.h.
| size_t VM2D::MechanicsDeformable::indexOfUpperLeftAngle |
Definition at line 173 of file Mechanics2DDeformable.h.
| size_t VM2D::MechanicsDeformable::indexOfUpperRightAngle |
хорда
Definition at line 172 of file Mechanics2DDeformable.h.
| std::vector<ChordPanel> VM2D::MechanicsDeformable::initialChord |
Definition at line 177 of file Mechanics2DDeformable.h.
| std::vector<std::vector<Point2D> > VM2D::MechanicsDeformable::initialPossibleWays |
Definition at line 184 of file Mechanics2DDeformable.h.
|
inherited |
Переменная, отвечающая за то, деформируется профиль или нет
Definition at line 131 of file Mechanics2D.h.
|
inherited |
Переменная, отвечающая за то, двигается профиль или нет
Definition at line 128 of file Mechanics2D.h.
| std::vector<double> VM2D::MechanicsDeformable::lowerShifts |
Definition at line 180 of file Mechanics2DDeformable.h.
|
protectedinherited |
Умный указатель на парсер параметров механической системы
Definition at line 98 of file Mechanics2D.h.
|
protectedinherited |
Номер профиля в паспорте
Definition at line 82 of file Mechanics2D.h.
|
inherited |
Definition at line 112 of file Mechanics2D.h.
|
inherited |
Definition at line 106 of file Mechanics2D.h.
|
inherited |
Definition at line 118 of file Mechanics2D.h.
|
inherited |
Текущие положение профиля
Definition at line 112 of file Mechanics2D.h.
|
inherited |
Начальное положение профиля
Definition at line 106 of file Mechanics2D.h.
|
inherited |
Текущие положение профиля
Definition at line 118 of file Mechanics2D.h.
| std::vector<double> VM2D::MechanicsDeformable::upperShifts |
Definition at line 179 of file Mechanics2DDeformable.h.
|
inherited |
Текущие скорость центра и угловая скорость
Definition at line 109 of file Mechanics2D.h.
|
inherited |
Начальная скорость центра и угловая скорость
Definition at line 103 of file Mechanics2D.h.
|
inherited |
Скорость и отклонение с предыдущего шага
Definition at line 115 of file Mechanics2D.h.
|
protectedinherited |
Константная ссылка на структуру с параметрами виртуального вихревого слоя для профиля
инициализируется автоматом в конструкторе
Definition at line 95 of file Mechanics2D.h.
|
inherited |
Вектор силы и момент вязкого трения, действующие на профиль
Definition at line 138 of file Mechanics2D.h.
|
inherited |
Definition at line 139 of file Mechanics2D.h.
|
protectedinherited |
Константная ссылка на решаемую задачу
Definition at line 79 of file Mechanics2D.h.
|
inherited |
Definition at line 109 of file Mechanics2D.h.
|
inherited |
Definition at line 103 of file Mechanics2D.h.
|
inherited |
Definition at line 115 of file Mechanics2D.h.