|
VM2D 1.14
Vortex methods for 2D flows simulation
|
|
VM2D 1.14
Vortex methods for 2D flows simulation
|
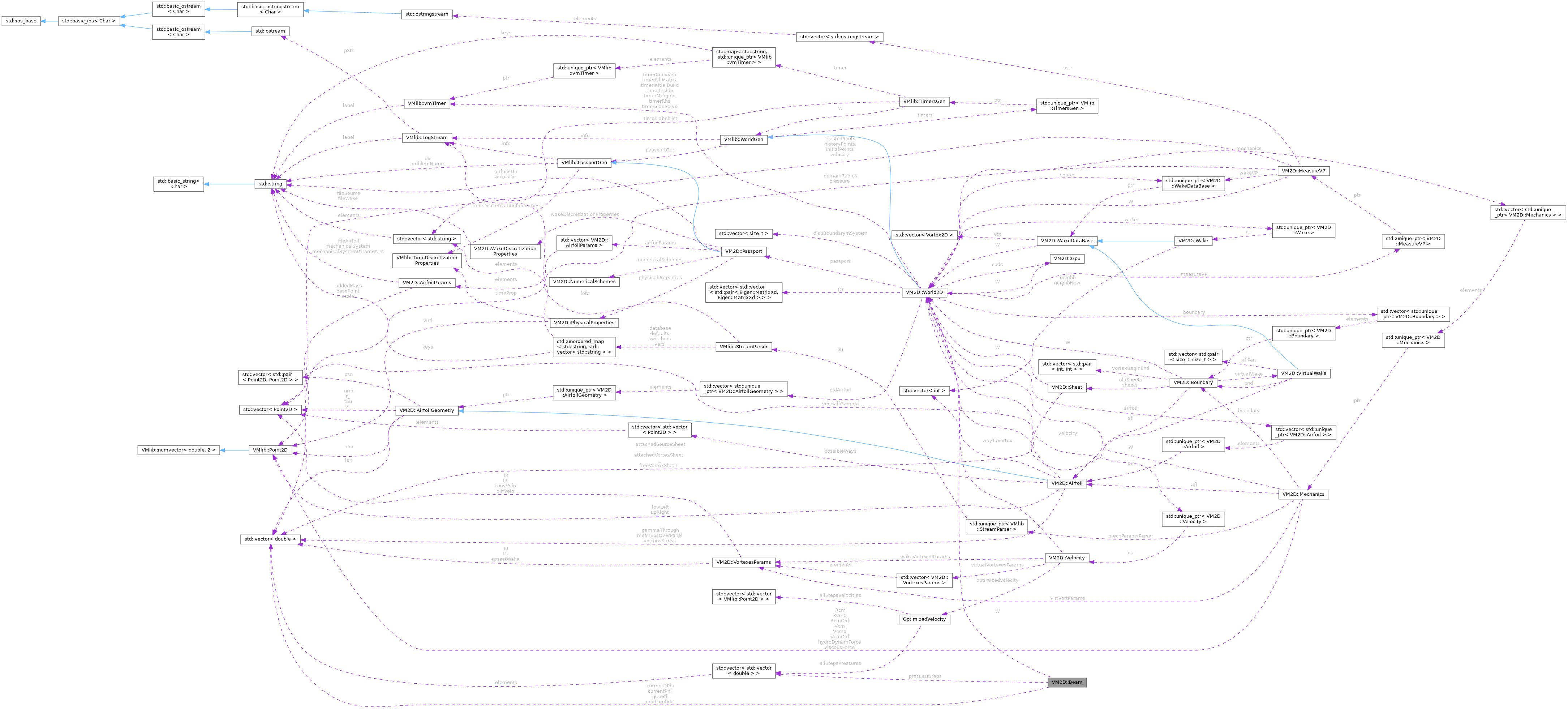
Вспомогательный класс Beam для описания упругой хорды деформируемой балки More...
#include <Mechanics2DDeformable.h>
Public Member Functions | |
| double | shape (int n, double x) const |
| Beam (const World2D &W_, bool fsi_, double x0_, double L_, int R_) | |
| double | phi (int n, double t) const |
| void | solveDU (int n, double dt) |
| void | solveDU_RK (int n, double dt) |
| double | getTotalDisp (double x, double t) const |
| double | getGivenLaw (double x, double t, double deformParam) const |
Public Attributes | |
| const bool | fsi |
| const World2D & | W |
| double | x0 |
| double | L |
| double | rho |
| double | F |
| double | EJ |
| int | R |
| const std::vector< double > | unitLambda = { 1.87510407, 4.69409113, 7.854757, 10.99554073, 14.1371683 } |
| std::vector< double > | qCoeff |
| const double | intSqUnitShape = 0.25 |
| std::vector< double > | currentPhi |
| std::vector< double > | currentDPhi |
| const size_t | nLastSteps = 1 |
| std::vector< std::vector< double > > | presLastSteps |
Вспомогательный класс Beam для описания упругой хорды деформируемой балки
Definition at line 61 of file Mechanics2DDeformable.h.
| Beam::Beam | ( | const World2D & | W_, |
| bool | fsi_, | ||
| double | x0_, | ||
| double | L_, | ||
| int | R_ | ||
| ) |
| double Beam::getGivenLaw | ( | double | x, |
| double | t, | ||
| double | deformParam | ||
| ) | const |
Definition at line 137 of file Mechanics2DDeformable.cpp.
| double Beam::getTotalDisp | ( | double | x, |
| double | t | ||
| ) | const |
Definition at line 129 of file Mechanics2DDeformable.cpp.
| double Beam::phi | ( | int | n, |
| double | t | ||
| ) | const |
Definition at line 71 of file Mechanics2DDeformable.cpp.
|
inline |
Definition at line 83 of file Mechanics2DDeformable.h.

| void Beam::solveDU | ( | int | n, |
| double | dt | ||
| ) |
Definition at line 76 of file Mechanics2DDeformable.cpp.
| void Beam::solveDU_RK | ( | int | n, |
| double | dt | ||
| ) |
Definition at line 95 of file Mechanics2DDeformable.cpp.

| std::vector<double> VM2D::Beam::currentDPhi |
Definition at line 91 of file Mechanics2DDeformable.h.
| std::vector<double> VM2D::Beam::currentPhi |
Definition at line 91 of file Mechanics2DDeformable.h.
| double VM2D::Beam::EJ |
Definition at line 71 of file Mechanics2DDeformable.h.
| double VM2D::Beam::F |
Definition at line 71 of file Mechanics2DDeformable.h.
| const bool VM2D::Beam::fsi |
Definition at line 64 of file Mechanics2DDeformable.h.
| const double VM2D::Beam::intSqUnitShape = 0.25 |
Definition at line 80 of file Mechanics2DDeformable.h.
| double VM2D::Beam::L |
Definition at line 69 of file Mechanics2DDeformable.h.
| const size_t VM2D::Beam::nLastSteps = 1 |
Definition at line 93 of file Mechanics2DDeformable.h.
| std::vector<std::vector<double> > VM2D::Beam::presLastSteps |
Definition at line 94 of file Mechanics2DDeformable.h.
| std::vector<double> VM2D::Beam::qCoeff |
Definition at line 77 of file Mechanics2DDeformable.h.
| int VM2D::Beam::R |
Definition at line 73 of file Mechanics2DDeformable.h.
| double VM2D::Beam::rho |
Definition at line 71 of file Mechanics2DDeformable.h.
| const std::vector<double> VM2D::Beam::unitLambda = { 1.87510407, 4.69409113, 7.854757, 10.99554073, 14.1371683 } |
Definition at line 76 of file Mechanics2DDeformable.h.
| const World2D& VM2D::Beam::W |
Definition at line 66 of file Mechanics2DDeformable.h.
| double VM2D::Beam::x0 |
Definition at line 68 of file Mechanics2DDeformable.h.