536{
537 Point2D p1, s1, p2, s2, di, dj;
541
542 for (size_t i = 0; i < nPanelsP; ++i)
543 {
544 std::array<int, 2> vecV = { ((int)i - 1 >= 0) ? int(i - 1) : int(nPanelsP - 1), (i + 1 < nPanelsP) ? int(i + 1) : 0 };
545 for (int j : vecV)
546 {
547 p1 = aflP.
getR(i + 1) - aflP.
getR(j + 1);
548 s1 = aflP.
getR(i + 1) - aflP.
getR(j);
549 p2 = aflP.
getR(i) - aflP.
getR(j + 1);
551 di = aflP.
getR(i + 1) - aflP.
getR(i);
552 dj = aflP.
getR(j + 1) - aflP.
getR(j);
553
554 alpha = { \
557 (aflP.isAfter(i, j)) ? 0.0 :
VMlib::
Alpha(p1, p2) \
558 };
559
560 lambda = { \
563 (aflP.isAfter(i, j)) ? 0.0 :
VMlib::
Lambda(p1, p2) \
564 };
565
566 v00 = {
570 };
571
572 i00 =
IDPI / di.
length() * (-(alpha[0] * v00[0] + alpha[1] * v00[1] + alpha[2] * v00[2]).kcross() \
573 + (lambda[0] * v00[0] + lambda[1] * v00[1] + lambda[2] * v00[2]));
574
579
581
587
588 i11 = (
IDPI / di.
length()) * ((alpha[0] + alpha[2]) * v11[0] + (alpha[1] + alpha[2]) * v11[1] + alpha[2] * v11[2]\
589 + ((lambda[0] + lambda[2]) * v11[0] + (lambda[1] + lambda[2]) * v11[1] + lambda[2] * v11[2] \
592 prec1[i] = (i11) * (1.0 / dj.
length());
594 prea1[i] = (i11) * (1.0 / dj.
length());
595 }
596 }
597 }
598}
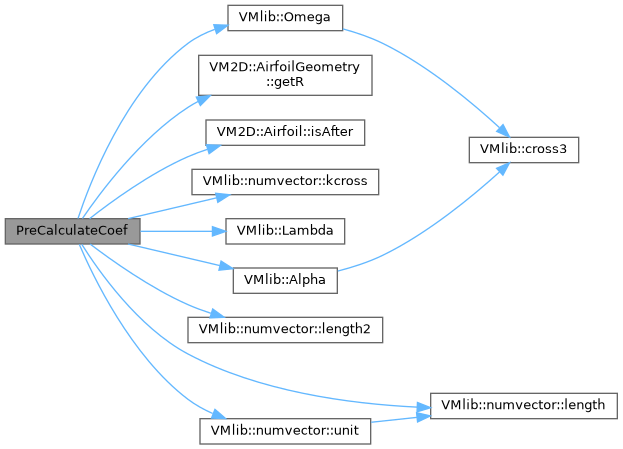
const Point2D & getR(size_t q) const
–í–æ–∑–≤—Ä–∞—Ç –∫–æ–Ω—Å—Ç–∞–Ω—Ç–Ω–æ–π —Å—Å—ã–ª–∫–∏ –Ω–∞ –≤–µ—Ä—à–∏–Ω—É –ø—Ä–æ—Ñ–∏–ª—è
bool isAfter(size_t i, size_t j) const
–ü—Ä–æ–≤–µ—Ä–∫–∞, –∏–¥–µ—Ç –ª–∏ –≤–µ—Ä—à–∏–Ω–∞ i —Å–ª–µ–¥–æ–º –∑–∞ –≤–µ—Ä—à–∏–Ω–æ–π j.
–®–∞–±–ª–æ–Ω–Ω—ã–π –∫–ª–∞—Å—Å, –æ–ø—Ä–µ–¥–µ–ª—è—é—â–∏–π –≤–µ–∫—Ç–æ—Ä —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–Ω–æ–π –¥–ª–∏–Ω—ã –§–∞–∫—Ç–∏—á–µ—Å–∫–∏ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç —Å–æ–±–æ–π –º–∞—Å—Å–∏–≤,...
numvector< T, 2 > kcross() const
–ì–µ–æ–º–µ—Ç—Ä–∏—á–µ—Å–∫–∏–π –ø–æ–≤–æ—Ä–æ—Ç –¥–≤—É–º–µ—Ä–Ω–æ–≥–æ –≤–µ–∫—Ç–æ—Ä–∞ –Ω–∞ 90 –≥—Ä–∞–¥—É—Å–æ–≤
auto length2() const -> typename std::remove_const< typename std::remove_reference< decltype(this->data[0])>::type >::type
–í—ã—á–∏—Å–ª–µ–Ω–∏–µ –∫–≤–∞–¥—Ä–∞—Ç–∞ –Ω–æ—Ä–º—ã (–¥–ª–∏–Ω—ã) –≤–µ–∫—Ç–æ—Ä–∞
auto unit(P newlen=1) const -> numvector< typename std::remove_const< decltype(this->data[0] *newlen)>::type, n >
–í—ã—á–∏—Å–ª–µ–Ω–∏–µ –æ—Ä—Ç–∞ –≤–µ–∫—Ç–æ—Ä–∞ –∏–ª–∏ –≤–µ–∫—Ç–æ—Ä–∞ –∑–∞–¥–∞–Ω–Ω–æ–π –¥–ª–∏–Ω—ã, –∫–æ–ª–ª–∏–Ω–µ–∞—Ä–Ω–æ–≥–æ –¥–∞–Ω–Ω–æ–º—É
P length() const
–í—ã—á–∏—Å–ª–µ–Ω–∏–µ 2-–Ω–æ—Ä–º—ã (–¥–ª–∏–Ω—ã) –≤–µ–∫—Ç–æ—Ä–∞
const double IDPI
–ß–∏—Å–ª–æ .
double Lambda(const Point2D &p, const Point2D &s)
–í—Å–ø–æ–º–æ–≥–∞—Ç–µ–ª—å–Ω–∞—è —Ñ—É–Ω–∫—Ü–∏—è –≤—ã—á–∏—Å–ª–µ–Ω–∏—è –ª–æ–≥–∞—Ä–∏—Ñ–º–∞ –æ—Ç–Ω–æ—à–µ–Ω–∏—è –Ω–æ—Ä–º –≤–µ–∫—Ç–æ—Ä–æ–≤
double Alpha(const Point2D &p, const Point2D &s)
–í—Å–ø–æ–º–æ–≥–∞—Ç–µ–ª—å–Ω–∞—è —Ñ—É–Ω–∫—Ü–∏—è –≤—ã—á–∏—Å–ª–µ–Ω–∏—è —É–≥–ª–∞ –º–µ–∂–¥—É –≤–µ–∫—Ç–æ—Ä–∞–º–∏
Point2D Omega(const Point2D &a, const Point2D &b, const Point2D &c)
–í—Å–ø–æ–º–æ–≥–∞—Ç–µ–ª—å–Ω–∞—è —Ñ—É–Ω–∫—Ü–∏—è –≤—ã—á–∏—Å–ª–µ–Ω–∏—è –≤–µ–ª–∏—á–∏–Ω—ã .